{kind=link}
An Office-Like Map Generator for Player/Stage.
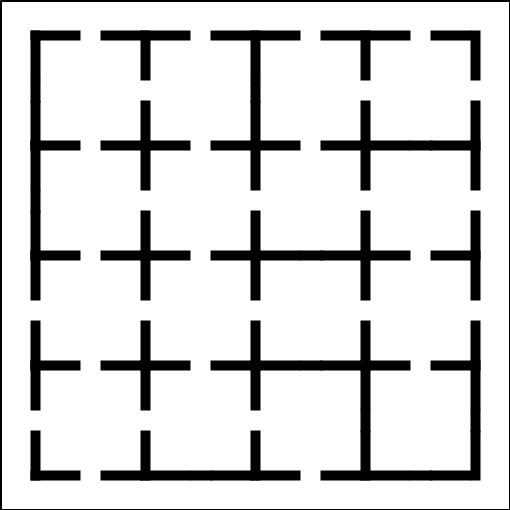
This repository is a collection of tools and notes for building Office-like Environment maps for Player/Stage. These maps have been used in a number of research papers on sequential auctions for multi-robot task allocation problems.
The maps generated by the application in the javaSrc directory guarantee that all rooms are accessible.
USAGE: java nz.net.brad.ExperimentConfigGenerator playerConfig.cfg stageConfig.world numberOfRobots outputMap.png optionalMinimumNumberOfDoorsOpen
This application generates a PNG map file for use with Player/Stage and supporting player and stage configuration files.
Apache Batik is required for converting SVG files to PNG. Stage files often require robot and laser descriptions which are included in the resources directory.
generator.c in the cSrc directory creates SVG maps with no guarantee that all rooms are accessible. robotGenerator.c in the cSrc direction outputs robot pose values for stage configuration files. These poses are guaranteed to not be inside walls. But robots may be placed on top of each other.