Communications
Here's a visual description of the communications between the main components of the simulation environment (the images are generated using Jumly).
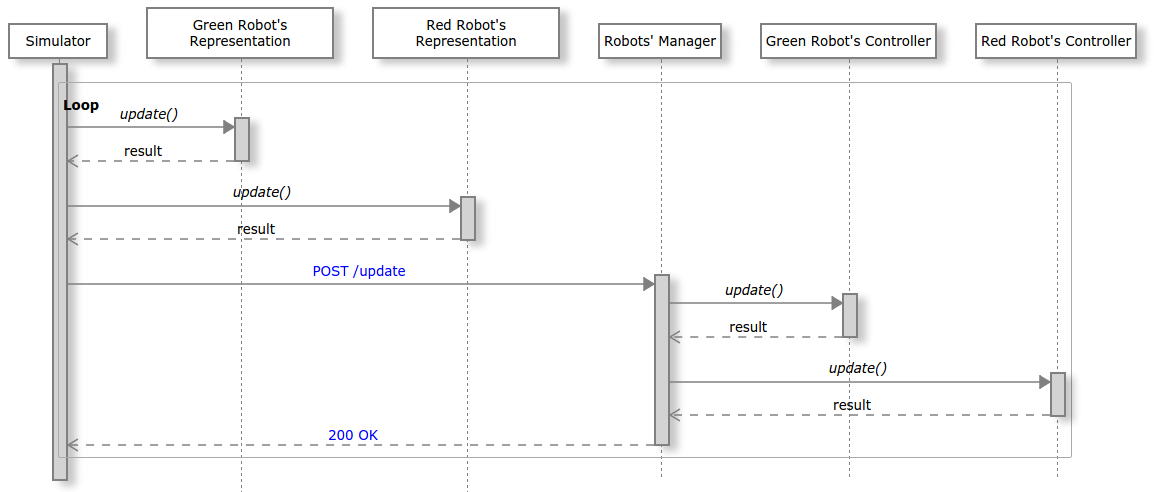
The schema of communications. In a loop:
-
the simulator updates (and gets the updates from) the representation of the two robots in the scene;
-
the simulator makes an HTTP POST request to the robot's manager;
-
the robots' manager passes the data received from the simulator to the application controllers of the robots;
-
the application controllers use the data received and change the behavior of the robot by setting the writing on the (virtual) pins of the devices, then pass the data back to the robots' manager;
-
the robots' manager sends the response to the simulator.
Data are encoded in JSON format.
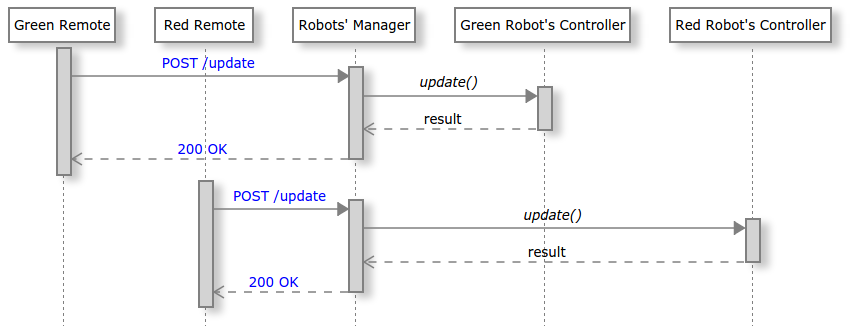
If a virtual remote control is used, the robots' manager receive updates from it exactly in the same way.
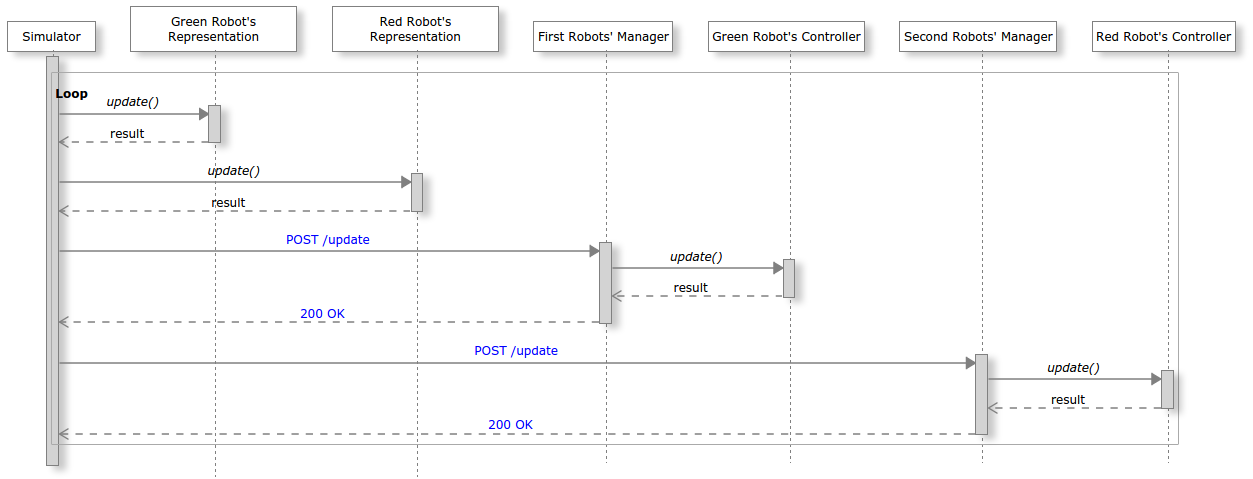
Nothing prevents from having more than one robot's manager, each managing one or more robots.
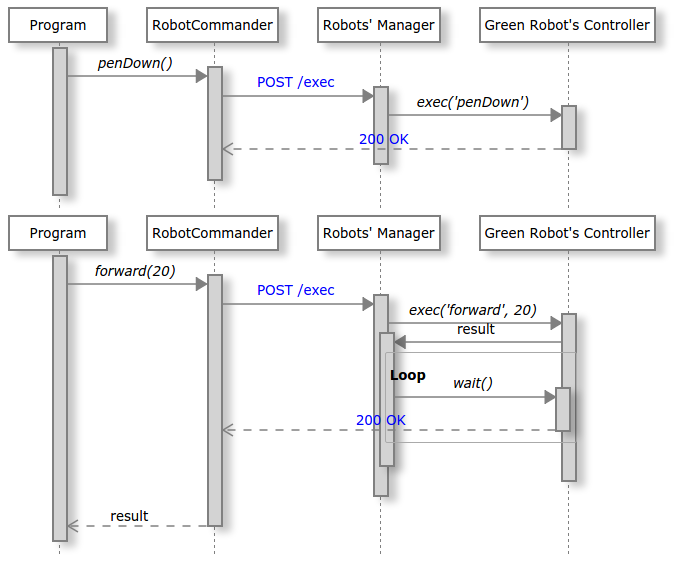
When high-level commands are executed, the robots' manager delegates the response to the robot's application controller, that sends it when the job is completed.