-
Notifications
You must be signed in to change notification settings - Fork 37
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
docs(simple_pure_pursuit): add README (#2)
* add parameter description Signed-off-by: mitukou1109 <[email protected]> * add README Signed-off-by: mitukou1109 <[email protected]> --------- Signed-off-by: mitukou1109 <[email protected]>
- Loading branch information
1 parent
67e3793
commit 07c62c1
Showing
2 changed files
with
68 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,24 @@ | ||
| # Simple Pure Pursuit | ||
|
|
||
| The `simple_pure_pursuit` node receives a reference trajectory from `motion_velocity_smoother` and calculates the control command using the pure pursuit algorithm. | ||
|
|
||
| ## Flowchart | ||
|
|
||
| 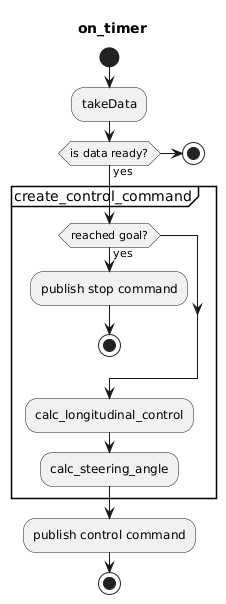 | ||
|
|
||
| ## Input topics | ||
|
|
||
| | Name | Type | Description | | ||
| | :------------------- | :------------------------------------------ | :------------------------------- | | ||
| | `~/input/odometry` | `nav_msgs::msg::Odometry` | ego odometry | | ||
| | `~/input/trajectory` | `autoware_planning_msgs::msg::Trajectory` | reference trajectory | | ||
|
|
||
| ## Output topics | ||
|
|
||
| | Name | Type | Description | QoS Durability | | ||
| | :------------------------- | :------------------------------------ | :-------------- | :------------- | | ||
| | `~/output/control_command` | `autoware_control_msgs::msg::Control` | control command | `volatile` | | ||
|
|
||
| ## Parameters | ||
|
|
||
| {{ json_to_markdown("control/autoware_simple_pure_pursuit/schema/simple_pure_pursuit.schema.json") }} |
44 changes: 44 additions & 0 deletions
44
control/autoware_simple_pure_pursuit/schema/simple_pure_pursuit.schema.json
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,44 @@ | ||
| { | ||
| "$schema": "http://json-schema.org/draft-07/schema#", | ||
| "title": "Parameters for Simple Pure Pursuit Node", | ||
| "type": "object", | ||
| "definitions": { | ||
| "autoware_simple_pure_pursuit": { | ||
| "type": "object", | ||
| "properties": { | ||
| "lookahead_gain": { | ||
| "type": "number", | ||
| "description": "Gain for lookahead distance calculation: {lookahead distance} = lookahead_gain * {target velocity} + lookahead_min_distance", | ||
| "minimum": 0.0 | ||
| }, | ||
| "lookahead_min_distance": { | ||
| "type": "number", | ||
| "description": "Minimum lookahead distance [m]", | ||
| "minimum": 0.0 | ||
| }, | ||
| "speed_proportional_gain": { | ||
| "type": "number", | ||
| "description": "Gain for longitudinal acceleration calculation: {longitudinal acceleration} = speed_proportional_gain * ({target velocity} - {current velocity})", | ||
| "minimum": 0.0 | ||
| }, | ||
| "use_external_target_vel": { | ||
| "type": "boolean", | ||
| "description": "Whether to use external target velocity" | ||
| }, | ||
| "external_target_vel": { | ||
| "type": "number", | ||
| "description": "External target velocity [m/s]", | ||
| "minimum": 0.0 | ||
| } | ||
| }, | ||
| "required": [ | ||
| "lookahead_gain", | ||
| "lookahead_min_distance", | ||
| "speed_proportional_gain", | ||
| "use_external_target_vel", | ||
| "external_target_vel" | ||
| ], | ||
| "additionalProperties": false | ||
| } | ||
| } | ||
| } |