{kind=link}
Source code for The Anna Maria. Licensed under the GPLv3.
Format: pkg (version tested)
Libraries:
- glibc (2.19)
- guile (2.0.11)
- ncurses (5.9)
- pthread (2.19)
Tools:
- cmake (2.8.12.2)
- make (4.0)
Simply execute these commands:
mkdir build
cd lib
make
mv *.a ../build
cd ../build
cmake ..
make
This should have fully built the executable rov.
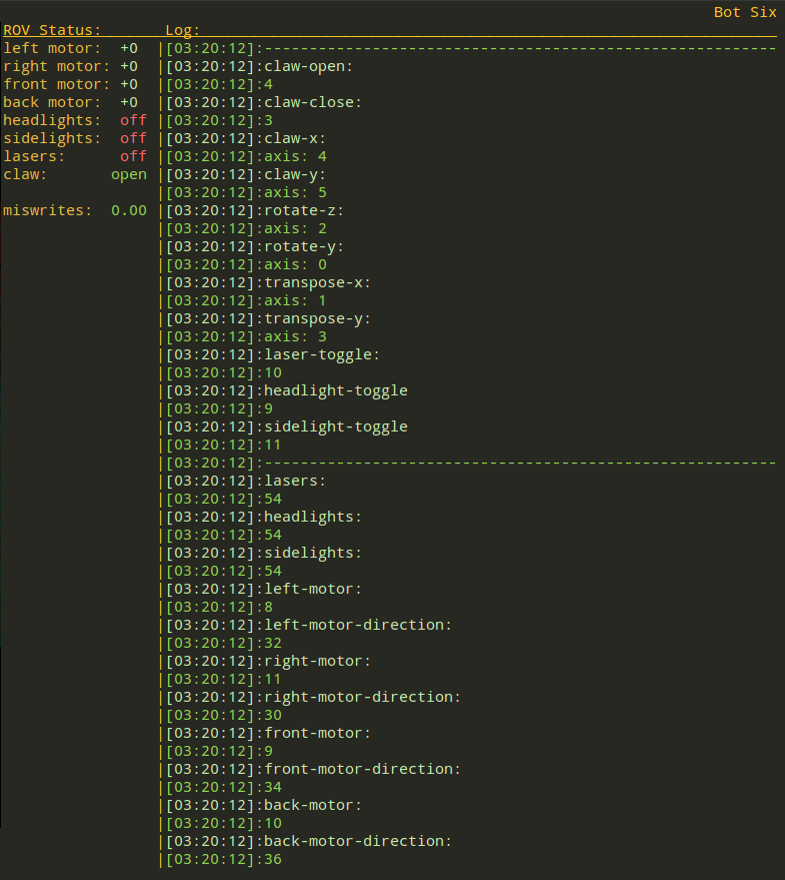
On the left is the realtime statistics about the robot, while on the right is the console log.
The console will be populated with various messages triggered from events on both the robot or the computer. For example, when one reloads the keybinds, or when a message fails to send. The console logs in multiple colors, ussually depending on the type of message.
The realtime statistics panel is populated with the values being sent to each
motor, along with the state of the various toggle devices. The miswrites field
shows the value of write failueres / successful writes. This number is important
to watch. Remember, there are all kinds of things that can cause the write()
call to fail.