-
Notifications
You must be signed in to change notification settings - Fork 1
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
9 changed files
with
702 additions
and
748 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,14 +1,9 @@ | ||
| # vector_datatype | ||
| This library includes structs for 3d vectors and quaternions. Both vectors and quaternions can perform basic operations such as addition, subtraction, multiplication, division, increment, decrement, etc. Other operations include the dot product, cross product, magnitude, and normalize. | ||
|
|
||
| Quaternions can also be defined as unit quaternions to represent rotations and can be used to rotate and scale vectors. Vectors are compatible with quaternions, and both types are compatible with arrays. A length-3 array can be added, subtracted, etc, from a vector or a quaternion, and a length-4 array can perform the same operations with a quaternion. See the examples for a complete list of the operations available for each type. | ||
|
|
||
| For more information on vector and quaternion operations, see these links: | ||
|
|
||
| - [Quaternions and rotations](http://danceswithcode.net/engineeringnotes/quaternions/quaternions.html) | ||
| - [Quaternion operations](http://graphics.stanford.edu/courses/cs348a-17-winter/Papers/quaternion.pdf) | ||
| - [Vector operations](http://emweb.unl.edu/Math/mathweb/vectors/vectors.html) | ||
|
|
||
|  | ||
|  | ||
|
|
||
| # vector_datatype | ||
| This is a library for 3d vectors and quaternions. It includes two structs to define each datatype. Both vectors and quaternions can perform basic operations such as addition, subtraction, multiplication, division, increment, decrement, and their analogs for multiplication and division. Vectors and quaternions are also compatible with each other. | ||
|
|
||
| Included are other operations such as vector dot product and cross product. Quaternions can also be constructed as unit quaternions to represent rotations. They can also rotate vectors. Both datatypes are compatible with arrays, meaning that a length-3 array can be added, subtracted, etc from a vector. This also applies to quaternions. | ||
|
|
||
| For more information on vector and quaternion operations, see these links: | ||
|
|
||
| - [Quaternion operations](http://graphics.stanford.edu/courses/cs348a-17-winter/Papers/quaternion.pdf) | ||
| - [Vector operations](http://emweb.unl.edu/Math/mathweb/vectors/vectors.html) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,184 +1,163 @@ | ||
| /* | ||
| This sketch shows to perform operations on quaternions and how to convert arrays to quaternions. | ||
| */ | ||
|
|
||
| #include <quaternion_type.h> | ||
|
|
||
| //======= Display functions ======= | ||
|
|
||
| void printQuat( vec3_t vec ) { | ||
| Serial.print( vec.x ); | ||
| Serial.print( ", " ); | ||
| Serial.print( vec.y ); | ||
| Serial.print( ", " ); | ||
| Serial.print( vec.z ); | ||
| } | ||
|
|
||
| void printQuat( quat_t quat ) { | ||
| Serial.print( quat.w ); | ||
| Serial.print( ", " ); | ||
| printQuat( quat.v ); | ||
| } | ||
|
|
||
| template<typename T=quat_t> | ||
| void printOperation(String label, T input) { | ||
| Serial.println(label); | ||
| Serial.print( "\t\t(" ); | ||
| printQuat(input); | ||
| Serial.print( ")\n\n" ); | ||
| } | ||
|
|
||
| //========== Main program ========= | ||
|
|
||
| void setup() { | ||
| Serial.begin(9600); | ||
| Serial.flush(); | ||
|
|
||
| //-------- Quaternions -------- | ||
| quat_t q1 = { 1, 0, 0, 0 }; | ||
| quat_t q2 = { 0, 1, 0, 0 }; | ||
| quat_t q3 = { 0, 0, 1, 0 }; | ||
| quat_t q4 = { 0, 0, 0, 1 }; | ||
| quat_t q5; | ||
|
|
||
| // 1. Basic operations: | ||
| // Quaternions can be manipulated in the same way as scalar values | ||
|
|
||
| // Addition | ||
| q5 = q1 + q2; | ||
| printOperation( "1. Addition: ", q5 ); | ||
|
|
||
| // Subtraction | ||
| q5 = q2 - q3; | ||
| printOperation( "2. Subtraction: ", q5 ); | ||
|
|
||
| // Negation: | ||
| q5 = -q5; | ||
| printOperation( "3. Negation: ", q5 ); | ||
|
|
||
| // Increment: | ||
| q5 += q4; | ||
| printOperation( "4. Increment: ", q5 ); | ||
|
|
||
| // Decrement: | ||
| q5 -= q1; | ||
| printOperation( "5. Decrement: ", q5 ); | ||
|
|
||
| // Scalar product: | ||
| q5 = q5*5; | ||
| printOperation( "6A. Scalar product: ", q5 ); | ||
| // Reverse order | ||
| q5 = -3*q5; | ||
| printOperation( "6B. Scalar product (reverse order): ", q5 ); | ||
|
|
||
| // Scalar divide: | ||
| q5 = q5/8; | ||
| printOperation( "7. Scalar divide: ", q5 ); | ||
|
|
||
| // Scalar self multiply: | ||
| q5 *= 10; | ||
| printOperation( "8. Scalar self multiply: ", q5 ); | ||
|
|
||
| // Scalar self divide: | ||
| q5 /= 2; | ||
| printOperation( "9. Scalar self divide: ", q5 ); | ||
|
|
||
| // 2. Quaternion multiplication and division: | ||
| /* Quats can be multiplied together to generate a new quaternion. This can encode multiple rotations */ | ||
|
|
||
| // Multiply | ||
| q5 = q5*q1; | ||
| printOperation( "10. Quaternion multiply: ", q5 ); | ||
|
|
||
| // Divide | ||
| q5 = q5/q2; | ||
| printOperation( "11. Quaternion division: ", q5 ); | ||
|
|
||
| // Self multiply | ||
| q5 *= q3; | ||
| printOperation( "12. Quaternion self multiply: ", q5 ); | ||
|
|
||
| // Self divide | ||
| q5 /= q4; | ||
| printOperation( "13. Quaternion self divide: ", q5 ); | ||
|
|
||
| // 3. Important operations: | ||
|
|
||
| // Conjugate | ||
| printOperation( "14. Conjugate: ", q5.conj() ); | ||
|
|
||
| // Normalize | ||
| printOperation( "15. Normalize: ", q5.norm() ); | ||
|
|
||
| // Inner product | ||
| Serial.print( "16. Inner product: " ); | ||
| Serial.println( q5.inner() ); | ||
|
|
||
| // Magnitude | ||
| Serial.print( "17. Magnitude: " ); | ||
| Serial.print( q5.mag() ); | ||
| Serial.print("\n\n"); | ||
|
|
||
| // 4. Compatibility with arrays: | ||
| /* In operations between a quaternion and an array, the array will be interpreted as a quaternion */ | ||
| float arr[] = {1, 2, 3, 4}; | ||
|
|
||
| printOperation( "18. Quaternion and array addition: " , q5 + arr ); | ||
| printOperation( "19. Quaternion and array subtraction: ", q5 - arr ); | ||
| printOperation( "20. Quaternion and array multiply: " , q5 * arr ); | ||
|
|
||
| // Operations with arrays are not converted to a quaternion type. These need to be explicitly converted. | ||
| printOperation( "21. Array conversion (multiply): ", quat_t(arr)*3 ); | ||
| printOperation( "22. Array conversion (divide): " , quat_t(arr)/10 ); | ||
|
|
||
| //-- Compatibility with vectors | ||
| /* Vectors will be interpreted as quaternions without a scalar value (w = 0) */ | ||
| vec3_t vec = {1, 2, 3}; | ||
|
|
||
| printOperation( "23. Quaternion and vector addition: " , q5 + vec ); | ||
| printOperation( "24. Quaternion and vector subtraction: ", q5 - vec ); | ||
| printOperation( "25. Quaternion and vector multiply; " , q5 * vec ); | ||
|
|
||
| // 5. Vector rotation: a quaternion can rotate and stretch a 3D vector | ||
|
|
||
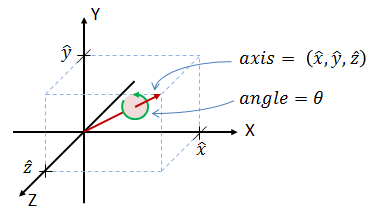
| // A) Rotate by angle about axis | ||
| constexpr float angle = (PI/180.0) * 30; | ||
| vec3_t axis = { 0, 1, 0 }; | ||
|
|
||
| /* Can choose between LARGE_ANGLE and SMALL_ANGLE. | ||
| * Use SMALL_ANGLE for a small angle approximation (less than 30 deg) and faster excecution */ | ||
| quat_t qrot; qrot.setRotation( axis, angle, SMALL_ANGLE ); | ||
| vec3_t vec_rot; // rotated vector | ||
| vec = { 1,0,0 }; // initial vector | ||
|
|
||
| // Rotate into angle | ||
| vec_rot = qrot.rotate(vec, GLOBAL_FRAME); | ||
|
|
||
| printOperation<vec3_t>( "26. Rotate by axis and angle (Global): ", vec_rot ); | ||
|
|
||
| // Rotate away from angle | ||
| vec_rot = qrot.rotate(vec, LOCAL_FRAME); | ||
|
|
||
| printOperation<vec3_t>( "27. Rotate by axis and angle (local): ", vec_rot ); | ||
|
|
||
| // B) Rotate by unit vector of magnitude sin(angle) | ||
| qrot.setRotation( axis, LARGE_ANGLE ); | ||
| vec_rot = qrot.rotate(vec, GLOBAL_FRAME); | ||
|
|
||
| printOperation<vec3_t>( "28. Rotate by unit vector: ", vec_rot ); | ||
|
|
||
| // 6. Axes projections: can choose between GLOBAL_FRAME and LOCAL_FRAME | ||
| /* GLOBAL_FRAME projects local axis-vectors to global coordinates | ||
| * LOCAL_FRAME projects global axis-vectors to local coordinates */ | ||
| qrot.setRotation( axis, angle, LARGE_ANGLE ); | ||
|
|
||
| vec3_t x = qrot.axisX(GLOBAL_FRAME); | ||
| vec3_t y = qrot.axisY(GLOBAL_FRAME); | ||
| vec3_t z = qrot.axisZ(GLOBAL_FRAME); | ||
|
|
||
| printOperation<vec3_t>( "29. X-axis vector: ", x ); | ||
| printOperation<vec3_t>( "30. Y-axis vector: ", y ); | ||
| printOperation<vec3_t>( "31. Z-axis vector: ", z ); | ||
| } | ||
|
|
||
| void loop() {} | ||
| /* | ||
| This sketch shows to perform operations on quaternions and how to convert arrays to quaternions. | ||
| */ | ||
|
|
||
| #include <quaternion_type.h> | ||
|
|
||
| // Display functions | ||
|
|
||
| void printVector( vec3_t vec ) { | ||
| Serial.print( vec.x ); | ||
| Serial.print( ", " ); | ||
| Serial.print( vec.y ); | ||
| Serial.print( ", " ); | ||
| Serial.print( vec.z ); | ||
| Serial.println(); | ||
| } | ||
|
|
||
| void printQuat( quat_t quat ) { | ||
| Serial.print( quat.w ); | ||
| Serial.print( ", " ); | ||
| printVector( quat.v ); | ||
| } | ||
|
|
||
| void setup() { | ||
| Serial.begin(9600); | ||
| Serial.flush(); | ||
|
|
||
| //-------- Quaternions -------- | ||
| quat_t q1 = { 1, 0, 0, 0 }; | ||
| quat_t q2 = { 0, 1, 0, 0 }; | ||
| quat_t q3 = { 0, 0, 1, 0 }; | ||
| quat_t q4 = { 0, 0, 0, 1 }; | ||
| quat_t q5; | ||
|
|
||
| //-- Operations: | ||
| // Quaternions can be manipulated in the same way as scalar values | ||
|
|
||
| // Addition | ||
| q5 = q1 + q2; | ||
| printQuat( q5 ); | ||
|
|
||
| // Subtraction | ||
| q5 = q5 - q3; | ||
| printQuat( q5 ); | ||
|
|
||
| // Negation: | ||
| q5 = -q5; | ||
| printQuat( q5 ); | ||
|
|
||
| // Increment: | ||
| q5 += q4; | ||
| printQuat( q5 ); | ||
|
|
||
| // Decrement: | ||
| q5 -= q1; | ||
| printQuat( q5 ); | ||
|
|
||
| // Scalar product: | ||
| q5 = q5*5; | ||
| printQuat( q5 ); | ||
| // Reverse order | ||
| q5 = -3*q5; | ||
| printQuat( q5 ); | ||
|
|
||
| // Scalar divide: | ||
| q5 = q5/8; | ||
| printQuat( q5 ); | ||
|
|
||
| // Scalar self multiply: | ||
| q5 *= 10; | ||
| printQuat( q5 ); | ||
|
|
||
| // Scalar self divide: | ||
| q5 /= 20; | ||
| printQuat( q5 ); | ||
|
|
||
| //- Important operations: | ||
| // These are useful operations that are commonly encountered. They are explicitly named for clarity. | ||
|
|
||
| // Conjugate | ||
| printQuat( q5.conj() ); | ||
|
|
||
| // Inner product | ||
| Serial.println( q5.inner() ); | ||
|
|
||
| // Magnitude | ||
| Serial.println( q5.mag() ); | ||
|
|
||
| // Normalize | ||
| printQuat( q5.norm() ); | ||
|
|
||
| //- Quaternion multiplication and division: | ||
| // Quats can be multiplied together to generate a new quaternion. This can encode simultaneous rotations. | ||
|
|
||
| // Multiply | ||
| q5 = q5*q2; | ||
| printQuat( q5 ); | ||
|
|
||
| // Divide | ||
| q5 = q5/q2; | ||
| printQuat( q5 ); | ||
|
|
||
| // Self multiply | ||
| q5 *= q4; | ||
| printQuat( q5 ); | ||
|
|
||
| // Self divide | ||
| q5 /= q3; | ||
| printQuat( q5 ); | ||
|
|
||
| //- Vector rotation: | ||
| // A quaternion can rotate and stretch a 3D vector | ||
|
|
||
| // A) Rotate by angle about axis | ||
| constexpr float angle = (PI/180.0) * 30; | ||
| vec3_t axis = { 0, 1, 0 }; | ||
|
|
||
| quat_t qrot; | ||
| qrot.setRotation( false, axis, angle ); // Unit quaternion: true = small angle approximation ; false = exact rotation | ||
| vec3_t vec = { 1,0,0 }; // Vector to rotate | ||
|
|
||
| // Rotate into angle | ||
| printQuat( qrot.rotate(true, vec) ); | ||
| // Rotate away from angle | ||
| printQuat( qrot.rotate(false, vec) ); | ||
|
|
||
| // Axes projections | ||
| printVector( qrot.axisX(true) ); | ||
| printVector( qrot.axisY(true) ); | ||
| printVector( qrot.axisZ(true) ); | ||
|
|
||
| // B) Rotate by unit vector | ||
| qrot.setRotation( false, axis ); // Unit vector has magniude sin(angle) | ||
|
|
||
| printQuat( qrot.rotate(true, vec) ); | ||
|
|
||
| //-- Compatibility with arrays: | ||
| // In operations between a quaternion and an array, the array will be interpreted as a quaternion. | ||
|
|
||
| float arr[] = {1, 2, 3, 4}; | ||
|
|
||
| printQuat( qrot + arr ); | ||
| printQuat( qrot - arr ); | ||
| printQuat( qrot*arr ); | ||
|
|
||
| // Operations with arrays are not converted to a quaternion type. These need to be explicitly converted. | ||
| printQuat( quat_t(arr)*3 ); | ||
| printQuat( quat_t(arr)/10 ); | ||
|
|
||
| printQuat( qrot.rotate(true, vec) ); | ||
|
|
||
| //-- Compatibility with vectors | ||
| // Vectors will be interpreted as quaternions without a scalar value (w = 0) | ||
|
|
||
| vec3_t v = {1, 2, 3}; | ||
| quat_t q6 = {1, 3, 3, 3}; | ||
|
|
||
| printQuat( q6 + v ); | ||
| printQuat( q6 - v ); | ||
| printQuat( q6*v ); | ||
| } | ||
|
|
||
| void loop() {} |
Oops, something went wrong.