
We derive a function of K,cost function :
where:
-
$f$ objective function -
$p$ penality function -
$r$ real number
A,B,C are matrix
-
$A \odot B = B \odot A$ -
$A \odot (B + C) = A \odot B + A \odot C = (B + C) \odot A$ -
$A \cdot B + A \cdot C = A \cdot (B + C)$ -
$\mathbb{I} \odot A = \mathbb{I} \odot A^\top \Rightarrow \mathbb{I} \odot (A + A^\top) = 2\cdot \mathbb{I}\odot A = 2\cdot \mathbb{I}\odot A^\top$

factorize form:
where :
$T_0 = \mathrm{inv}(K\odot \mathbb{I})$ $T_1 = T_0 \cdot X \cdot X^\top \cdot T_0 $ $T_3 = K \odot (\mathbb{I} - K)$
for the calculation of the hessian, we split in two parts.

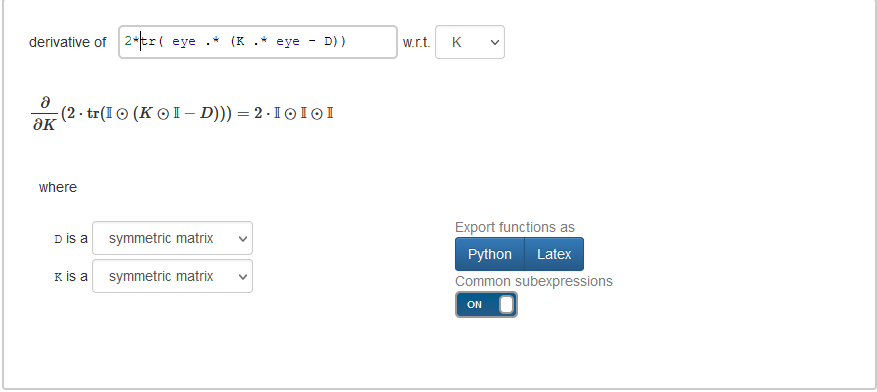
factorize form:
where:
$T_0 = \mathrm{inv}(K\odot \mathbb{I})$ $T_2 = (\mathbb{I} - K)$ $T_3 = T_0 \cdot (K \odot T_2)$ $T_4 = \mathbb{I} - 2\cdot T_3$ $T_5 = T_0 \cdot X \cdot X^\top \cdot T_0$ $T_6 = T_5 \cdot T_0$
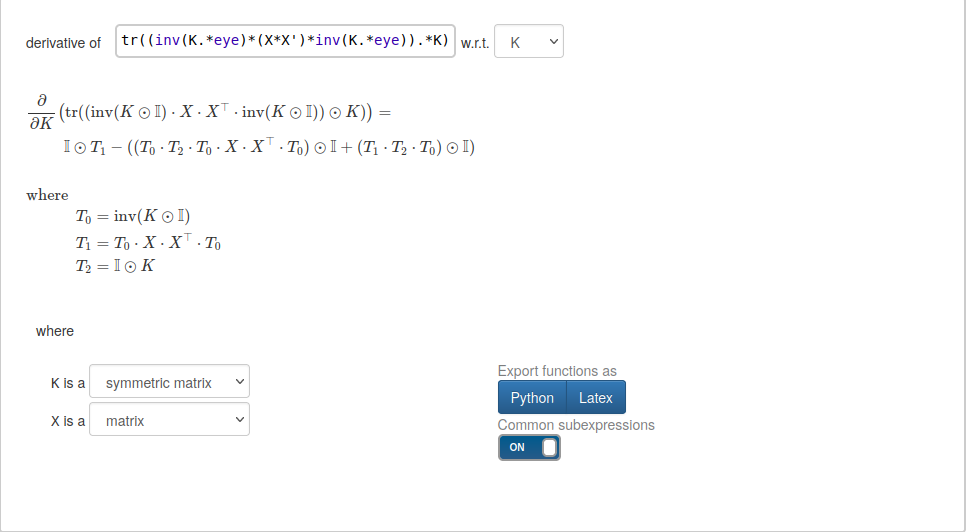
factorize form:
where:
$T_0 = \mathrm{inv}(K\odot \mathbb{I})$ $T_1 = T_1 = T_0 \cdot X \cdot X^\top \cdot T_0$ $T_2 = K \odot \mathbb{I}$


the cost gradient is good.

the cost is not symmetric because the derive1 therefore false. I don't know the reason that the objective function hessian is incorrect. In the programs, we use the trustregions method, the method only takes into account the cost function and the gradient