diff --git "a/02-GAMP\346\272\220\347\240\201\351\230\205\350\257\273/\345\217\214\351\242\221\351\235\236\345\267\256\351\235\236\347\273\204\345\220\210PPP\346\250\241\345\236\213.png" "b/02-GAMP\346\272\220\347\240\201\351\230\205\350\257\273/\345\217\214\351\242\221\351\235\236\345\267\256\351\235\236\347\273\204\345\220\210PPP\346\250\241\345\236\213.png"
new file mode 100644
index 0000000..cc6852a
Binary files /dev/null and "b/02-GAMP\346\272\220\347\240\201\351\230\205\350\257\273/\345\217\214\351\242\221\351\235\236\345\267\256\351\235\236\347\273\204\345\220\210PPP\346\250\241\345\236\213.png" differ
diff --git "a/02-GAMP\346\272\220\347\240\201\351\230\205\350\257\273/\347\262\276\345\257\206\345\215\225\347\202\271\345\256\232\344\275\215\357\274\210PPP\357\274\211\344\271\213\346\265\205\350\247\201_\345\221\250\351\224\213.pdf" "b/02-GAMP\346\272\220\347\240\201\351\230\205\350\257\273/\347\262\276\345\257\206\345\215\225\347\202\271\345\256\232\344\275\215\357\274\210PPP\357\274\211\344\271\213\346\265\205\350\247\201_\345\221\250\351\224\213.pdf"
new file mode 100644
index 0000000..d7a3a01
Binary files /dev/null and "b/02-GAMP\346\272\220\347\240\201\351\230\205\350\257\273/\347\262\276\345\257\206\345\215\225\347\202\271\345\256\232\344\275\215\357\274\210PPP\357\274\211\344\271\213\346\265\205\350\247\201_\345\221\250\351\224\213.pdf" differ
diff --git "a/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/01-GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\217\212\346\272\220\347\240\201\346\265\205\346\236\220.md" "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/01-GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\217\212\346\272\220\347\240\201\346\265\205\346\236\220.md"
index e33bebc..38f90eb 100644
--- "a/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/01-GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\217\212\346\272\220\347\240\201\346\265\205\346\236\220.md"
+++ "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/01-GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\217\212\346\272\220\347\240\201\346\265\205\346\236\220.md"
@@ -8,7 +8,7 @@
## 一、GAMP-GOOD 快速上手
-GAMP-GOOD 由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt界面可执行程序 Good_Gui 三部分组成,自2021年4月1.0版本至今已历经 15 个版本迭代,目前已实现常用 GNSS 观测值、广播星历、精密卫星轨道和钟差(实时、超快、快速、最终)、地球定向参数、卫星姿态ORBEX、DCB/DSB/OSB、SINEX周解、电离层和对流层延迟产品、天线相位中心等产品下载。
+GAMP-GOOD 由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt界面可执行程序 Good_Gui 三部分组成,自2021年4月1.0版本至今已历经 15 个版本迭代,目前已实现常用 GNSS 观测值、广播星历、精密卫星轨道和钟差、地球定向参数、卫星姿态ORBEX、DCB/DSB/OSB、SINEX周解、电离层和对流层延迟产品、天线相位中心等产品下载。
| 数据类型 | 用处 |
| :--------------------------------------: | :---------------------------------------: |
@@ -31,10 +31,16 @@ GAMP-GOOD 由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt
+---
+

+---
+

+
+
### 2、Good-Cui:命令行数据下载程序
> Windows:`good_cui.exe` + `yaml 配置文件路径`
diff --git "a/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md" "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md"
deleted file mode 100644
index 67b5041..0000000
--- "a/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md"
+++ /dev/null
@@ -1,499 +0,0 @@
-
-
-
GAMP-GOOD 快速上手及源码解析
-
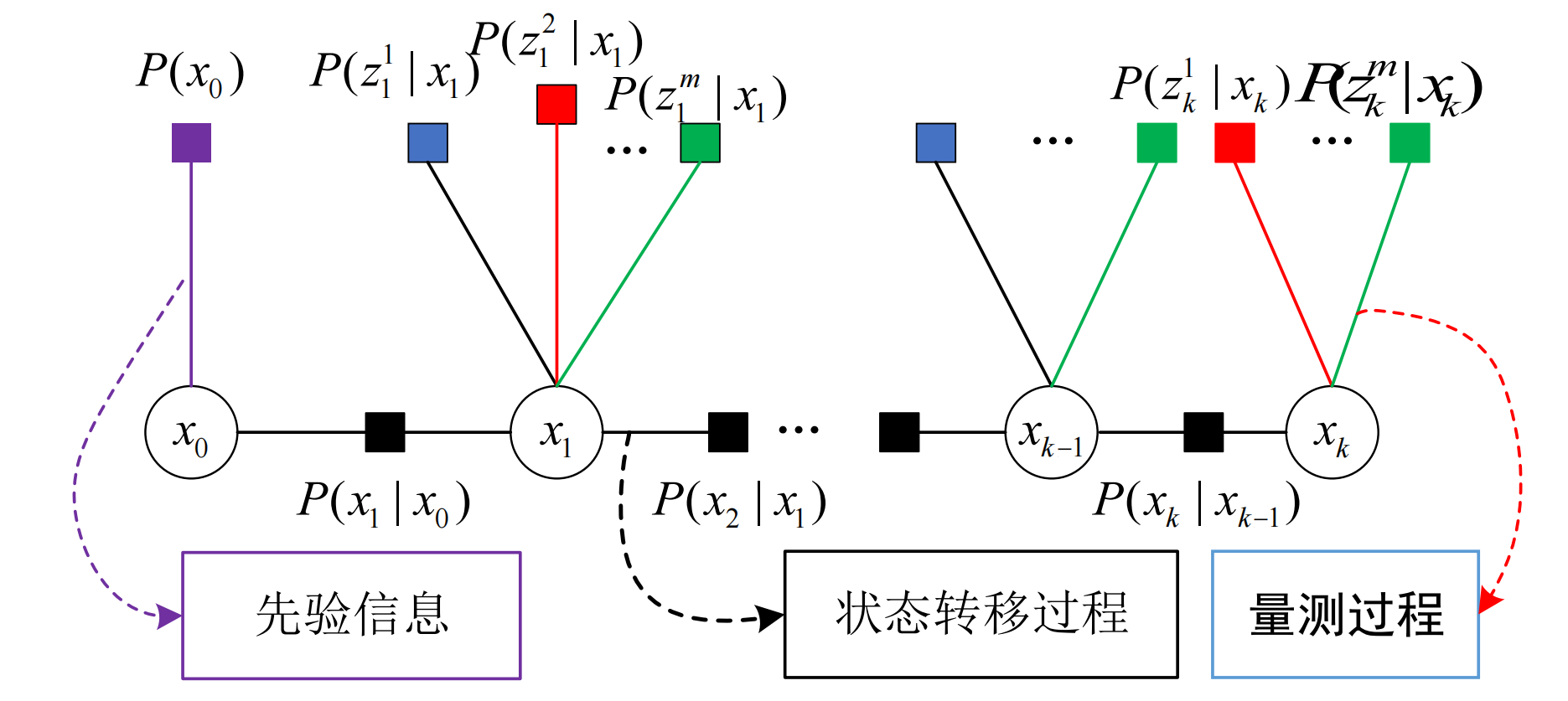 - **圆圈**:**变量节点**,表示系统待估计的状态,对应一个变量 $x$ 。
- **正方形**:**因子节点**,表示先验信息、状态转移和量测过程,对应一个局部函数 $f$ ,其中:
diff --git "a/Cover/NaviCode \345\260\217\345\267\245\345\214\240\345\205\254\344\274\227\345\217\267.png" "b/Cover/NaviCode \345\260\217\345\267\245\345\214\240\345\205\254\344\274\227\345\217\267.png"
new file mode 100644
index 0000000..aca68b0
Binary files /dev/null and "b/Cover/NaviCode \345\260\217\345\267\245\345\214\240\345\205\254\344\274\227\345\217\267.png" differ
diff --git a/README.md b/README.md
index 8fc2b4f..ec483fc 100644
--- a/README.md
+++ b/README.md
@@ -133,7 +133,7 @@
| 类型 | 项目/网址 |
| :----------------------------------------------------------: | :----------------------------------------------------------: |
-| [**GNSS 数据处理**](导航定位建图开源项目记录.md#GNSS) | **[RTKLIB](https://www.rtklib.com/)**、[RTKLIB-Demo5](https://github.com/rtklibexplorer/RTKLIB)、[learning_rtklib](https://github.com/LiZhengXiao99/learning_rtklib)、[rtklib-py](https://github.com/rtklibexplorer/rtklib-py)、[pyrtklib](https://github.com/IPNL-POLYU/pyrtklib)、[GPS-RTKLIB-ARM-F407VG](https://github.com/ngochieu642/GPS-RTKLIB-ARM-F407VG)、[MALIB](https://github.com/JAXA-SNU/MALIB)、[MatRTKLIB](https://github.com/taroz/MatRTKLIB)、[Taroz-gsdc2023](https://github.com/taroz/gsdc2023)、[CSSRLib](https://github.com/hirokawa/cssrlib)、[rtklib_ros_bridge](https://github.com/MapIV/rtklib_ros_bridge)、[FiPPP](https://github.com/HuChao-gnss/FiPPP)、[rtkrcv_ros](https://github.com/ajbfinesc/rtkrcv_ros)、**[GAMP](https://geodesy.noaa.gov/gps-toolbox/GAMP.htm)**、[GAMPII-GOOD](https://github.com/zhouforme0318/GAMPII-GOOD)、**[Ginan](https://github.com/GeoscienceAustralia/ginan)**、**[goGPS](https://github.com/goGPS-Project/goGPS_MATLAB)**、[goGPS_Java](https://github.com/goGPS-Project/goGPS_Java)、[BNC](https://igs.bkg.bund.de/ntrip/bnc)、[GREAT-PVT](https://github.com/GREAT-WHU/GREAT-PVT)、[GFZRNX](https://dataservices.gfz-potsdam.de/panmetaworks/showshort.php?id=escidoc:1577894)、[GNSSLogger](https://github.com/google/gps-measurement-tools)、[georinex](https://github.com/geospace-code/georinex)、[GAMIT/GLOBK](http://geoweb.mit.edu/gg/)、[GraphGNSSLib](https://github.com/weisongwen/GraphGNSSLib)、[NavCodeMonitor](https://github.com/weisongwen/NavCodeMonitor)、[Net_Diff](https://github.com/YizeZhang/Net_Diff)、[laika](https://github.com/commaai/laika)、[CSRS-PPP](https://webapp.csrs-scrs.nrcan-rncan.gc.ca/geod/tools-outils/ppp.php)、[POSGO](https://github.com/lizhengnss/POSGO)、[Pride-PPPAR](https://github.com/PrideLab/PRIDE-PPPAR)、[PPPwizard](http://www.ppp-wizard.net/)、[GPSTk](https://github.com/SGL-UT/GPSTk)、[gnsstk](https://github.com/SGL-UT/gnsstk)、[gnsstk-apps](https://github.com/SGL-UT/gnsstk-apps)、[G-NUT/Anubis](https://www.pecny.cz/Joomla25/index.php/gnss/sw/anubis)、[Teqc](https://www.unavco.org/software/data-processing/teqc/teqc.html)、[RNXQCE](https://github.com/cuizilu/RNXQCE)、[Bernese](https://www.bernese.unibe.ch/)、[gLAB](https://github.com/valgur/gLAB?tab=readme-ov-file)、[Look4Sat](https://github.com/rt-bishop/Look4Sat)、[RobustGNSS](https://github.com/wvu-navLab/RobustGNSS)、[ntrip](https://github.com/sevensx/ntrip)、[rtcm](https://github.com/Node-NTRIP/rtcm)、[cors](https://github.com/Erensu/cors)、[VrsCaster](https://github.com/DoubleString/VrsCaster)、[gstream](https://github.com/Jin-Whu/gstream)、[ogrp](https://github.com/Fraunhofer-IIS/ogrp)、[centipede](https://github.com/CentipedeRTK/centipede)、[TouchRTKStation](https://github.com/taroz/TouchRTKStation)、[rtkbase](https://github.com/Stefal/rtkbase)、[GREAT-IFCB](https://github.com/GREAT-WHU/GREAT-IFCB)、[gnss_comm](https://github.com/HKUST-Aerial-Robotics/gnss_comm)、[PPP-BayesTree](https://github.com/wvu-navLab/PPP-BayesTree)、[gnsspy](https://github.com/GNSSpy-Project/gnsspy)、[gnssgo](https://github.com/FengXuebin/gnssgo)、[raPPPid](https://github.com/TUW-VieVS/raPPPid)、[gnss-compass-ros](https://github.com/MapIV/gnss_compass_ros)、[gnss-attitude](https://github.com/low-earth-orbit/gnss-attitude)、[FCB-FILES](https://github.com/FCB-SGG/FCB-FILES)、[MG_APP](https://github.com/XiaoGongWei/MG_APP)、[gps_amcl](https://github.com/midemig/gps_amcl)、[deep_gnss](https://github.com/Stanford-NavLab/deep_gnss)、[TSAnalyzer](https://github.com/wudingcheng/TSAnalyzer)、[GNSS-TimeSeries-Viewers](https://github.com/kmaterna/GNSS_TimeSeries_Viewers)、[RTKinGSS](https://github.com/shaolinbit/RTKinGSS)、[gnss_lib_py](https://github.com/Stanford-NavLab/gnss_lib_py)、[PNT-Integrity](https://github.com/cisagov/PNT-Integrity)、[GORS](https://github.com/lengyanyanjing/GORS)、[GDDS](https://geodesy.noaa.gov/gps-toolbox/gdds.shtml)、[FAST](https://github.com/ChangChuntao/FAST)、[QGOPDD](https://github.com/yhw605/QGOPDD)、[gnss-downloader](https://github.com/Mereithhh/gnss-downloader)、[groops](https://github.com/groops-devs/groops)、[georb](https://github.com/Thomas-Loudis/georb)、[madocalib](https://github.com/QZSS-Strategy-Office/madocalib)、[OREKIT](https://link.zhihu.com/?target=https%3A//www.orekit.org/)、[rt-clk-service](https://github.com/DoubleString/rt-clk-service)、[polaris](https://github.com/PointOneNav/polaris)、[gnss-tec](https://github.com/gnss-lab/gnss-tec)、[utm](https://github.com/sfegan/utm)、[PW-from-GPS](https://github.com/ZiskinZiv/PW_from_GPS)、[GNSS-Multipath-Analysis-Software](https://github.com/paarnes/GNSS_Multipath_Analysis_Software)、[gnss-multipath-detector](https://github.com/EvgeniiMunin/gnss-multipath-detector)、[GNSS-Shadowing](https://github.com/xaedes/GNSS-Shadowing)、[gnssIR-python](https://github.com/kristinemlarson/gnssIR_python)、[GARNO](https://github.com/geoios/GARNO)、[GPSPACE](https://github.com/CGS-GIS/GPSPACE)、[GNSSDataQC](https://github.com/GNSS-FUN/GNSSDataQC)、[gnssr-synth](https://github.com/purnelldj/gnssr_synth)、[gnssIR-matlab-v3](https://github.com/kristinemlarson/gnssIR_matlab_v3)、[gnssrefl](https://github.com/kristinemlarson/gnssrefl)、[gnss2tws-green](https://github.com/jzshhh/gnss2tws_green)、[gnssSNR](https://github.com/kristinemlarson/gnssSNR)、[mphw](https://github.com/fgnievinski/mphw)、[hgpt_model](https://github.com/pjmateus/hgpt_model)、[GNSSR_MERRByS](https://github.com/pjalesSSTL/GNSSR_MERRByS)、[PyGPSClient](https://github.com/semuconsulting/PyGPSClient)、[STM32Primer2-GNSS-Tracker](https://github.com/nemuisan/STM32Primer2_GNSS_Tracker)、[STM32-GNSS](https://github.com/SimpleMethod/STM32-GNSS)、[GNSSTimeServer](https://github.com/Montecri/GNSSTimeServer)、[GNSS_Clock](https://github.com/stevemarple/GNSS_Clock)、[AgOpenGPS](https://github.com/farmerbriantee/AgOpenGPS)、[nmea-msgs](https://github.com/ros-drivers/nmea_msgs)、[LilyGo-LoRa-Series](https://github.com/Xinyuan-LilyGO/LilyGo-LoRa-Series)、[HASlib](https://github.com/nlsfi/HASlib)、[HASPPP](https://github.com/ZhangRunzhi20/HASPPP)、[NavDecoder](https://github.com/NavSesne/NavDecoder)、[OSNMA](https://github.com/Algafix/OSNMA)、[galileo-osnma](https://github.com/daniestevez/galileo-osnma)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[geodetic_utils](https://github.com/ethz-asl/geodetic_utils)、[ppp-tools](https://github.com/aewallin/ppp-tools)、[gpstest](https://github.com/barbeau/gpstest)、[iSniff-GPS](https://github.com/hubert3/iSniff-GPS)、[hypatia](https://github.com/snkas/hypatia)、[gps-measurement-tools](https://github.com/google/gps-measurement-tools)、[FE-GUT](https://github.com/zhaoqj23/FE-GUT)、[gnss-RX](https://github.com/HeryMwenegoha/gnss-RX)、[Pypredict](https://github.com/spel-uchile/Pypredict)、[novatel-gps-driver](https://github.com/swri-robotics/novatel_gps_driver)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[GNSS-Radar](https://github.com/taroz/GNSS-Radar)、[geodesy_modeling](https://github.com/kmaterna/geodesy_modeling)、[gnss-odometry](https://github.com/mgoar/gnss-odometry)、[Caster_Project](https://github.com/KOROyo123/Caster_Project)、[rviz_satellite](https://github.com/nobleo/rviz_satellite)、[gnatss](https://github.com/seafloor-geodesy/gnatss)、[gnssr_lowcost](https://github.com/purnelldj/gnssr_lowcost)、[satellite-position-calculation-mapping](https://github.com/egemengulpinar/satellite-position-calculation-mapping)、[SatellitePosition](https://github.com/LStudioLoren/SatellitePosition)、[GNSSTool](https://github.com/quectel-open-source/GNSSTool)、[pynex](https://github.com/swift-nav/pynex)、[pygnssutils](https://github.com/semuconsulting/pygnssutils)、[flipperzero-gps](https://github.com/ezod/flipperzero-gps)、[ROS-GPS](https://github.com/sigmaai/ROS-GPS)、[rtk-rs](https://github.com/rtk-rs)、[ge-gnss-visibility](https://github.com/taroz/ge-gnss-visibility)、[OpenRTK](https://github.com/AndreasArendt/OpenRTK)、[GNSS_RTK](https://github.com/SupakunZ/GNSS_RTK)、[LEOGPS](https://github.com/sammmlow/LEOGPS)、[GPSToolbox 投稿](https://geodesy.noaa.gov/gps-toolbox/exist.htm)、[barbeau-awesome-gnss 整理](https://github.com/barbeau/awesome-gnss)、[hdkarimi-awesome-gnss 整理](https://github.com/hdkarimi/awesome-gnss)、[mcraymer 整理](https://mcraymer.github.io/geodesy/index.html)、[Awesome-Geospatial 整理](https://github.com/sacridini/Awesome-Geospatial)、[GISResourcce 整理](https://gisresources.com/) |
+| [**GNSS 数据处理**](导航定位建图开源项目记录.md#GNSS) | **[RTKLIB](https://www.rtklib.com/)**、[RTKLIB-Demo5](https://github.com/rtklibexplorer/RTKLIB)、[learning_rtklib](https://github.com/LiZhengXiao99/learning_rtklib)、[rtklib-py](https://github.com/rtklibexplorer/rtklib-py)、[pyrtklib](https://github.com/IPNL-POLYU/pyrtklib)、[GPS-RTKLIB-ARM-F407VG](https://github.com/ngochieu642/GPS-RTKLIB-ARM-F407VG)、[MALIB](https://github.com/JAXA-SNU/MALIB)、[MatRTKLIB](https://github.com/taroz/MatRTKLIB)、[Taroz-gsdc2023](https://github.com/taroz/gsdc2023)、[CSSRLib](https://github.com/hirokawa/cssrlib)、[rtklib_ros_bridge](https://github.com/MapIV/rtklib_ros_bridge)、[FiPPP](https://github.com/HuChao-gnss/FiPPP)、[rtkrcv_ros](https://github.com/ajbfinesc/rtkrcv_ros)、**[GAMP](https://geodesy.noaa.gov/gps-toolbox/GAMP.htm)**、[GAMPII-GOOD](https://github.com/zhouforme0318/GAMPII-GOOD)、**[Ginan](https://github.com/GeoscienceAustralia/ginan)**、**[goGPS](https://github.com/goGPS-Project/goGPS_MATLAB)**、[goGPS_Java](https://github.com/goGPS-Project/goGPS_Java)、[BNC](https://igs.bkg.bund.de/ntrip/bnc)、[GREAT-PVT](https://github.com/GREAT-WHU/GREAT-PVT)、[GFZRNX](https://dataservices.gfz-potsdam.de/panmetaworks/showshort.php?id=escidoc:1577894)、[GNSSLogger](https://github.com/google/gps-measurement-tools)、[georinex](https://github.com/geospace-code/georinex)、[GAMIT/GLOBK](http://geoweb.mit.edu/gg/)、[GraphGNSSLib](https://github.com/weisongwen/GraphGNSSLib)、[NavCodeMonitor](https://github.com/weisongwen/NavCodeMonitor)、[Net_Diff](https://github.com/YizeZhang/Net_Diff)、[laika](https://github.com/commaai/laika)、[CSRS-PPP](https://webapp.csrs-scrs.nrcan-rncan.gc.ca/geod/tools-outils/ppp.php)、[POSGO](https://github.com/lizhengnss/POSGO)、[Pride-PPPAR](https://github.com/PrideLab/PRIDE-PPPAR)、[PPPwizard](http://www.ppp-wizard.net/)、[GPSTk](https://github.com/SGL-UT/GPSTk)、[gnsstk](https://github.com/SGL-UT/gnsstk)、[gnsstk-apps](https://github.com/SGL-UT/gnsstk-apps)、[G-NUT/Anubis](https://www.pecny.cz/Joomla25/index.php/gnss/sw/anubis)、[Teqc](https://www.unavco.org/software/data-processing/teqc/teqc.html)、[RNXQCE](https://github.com/cuizilu/RNXQCE)、[Bernese](https://www.bernese.unibe.ch/)、[gLAB](https://github.com/valgur/gLAB?tab=readme-ov-file)、[Look4Sat](https://github.com/rt-bishop/Look4Sat)、[RobustGNSS](https://github.com/wvu-navLab/RobustGNSS)、[ntrip](https://github.com/sevensx/ntrip)、[rtcm](https://github.com/Node-NTRIP/rtcm)、[cors](https://github.com/Erensu/cors)、[VrsCaster](https://github.com/DoubleString/VrsCaster)、[gstream](https://github.com/Jin-Whu/gstream)、[ogrp](https://github.com/Fraunhofer-IIS/ogrp)、[centipede](https://github.com/CentipedeRTK/centipede)、[TouchRTKStation](https://github.com/taroz/TouchRTKStation)、[rtkbase](https://github.com/Stefal/rtkbase)、[GREAT-IFCB](https://github.com/GREAT-WHU/GREAT-IFCB)、[gnss_comm](https://github.com/HKUST-Aerial-Robotics/gnss_comm)、[PPP-BayesTree](https://github.com/wvu-navLab/PPP-BayesTree)、[gnsspy](https://github.com/GNSSpy-Project/gnsspy)、[gnssgo](https://github.com/FengXuebin/gnssgo)、[raPPPid](https://github.com/TUW-VieVS/raPPPid)、[gnss-compass-ros](https://github.com/MapIV/gnss_compass_ros)、[gnss-attitude](https://github.com/low-earth-orbit/gnss-attitude)、[FCB-FILES](https://github.com/FCB-SGG/FCB-FILES)、[MG_APP](https://github.com/XiaoGongWei/MG_APP)、[gps_amcl](https://github.com/midemig/gps_amcl)、[deep_gnss](https://github.com/Stanford-NavLab/deep_gnss)、[TSAnalyzer](https://github.com/wudingcheng/TSAnalyzer)、[GNSS-TimeSeries-Viewers](https://github.com/kmaterna/GNSS_TimeSeries_Viewers)、[RTKinGSS](https://github.com/shaolinbit/RTKinGSS)、[gnss_lib_py](https://github.com/Stanford-NavLab/gnss_lib_py)、[PNT-Integrity](https://github.com/cisagov/PNT-Integrity)、[GORS](https://github.com/lengyanyanjing/GORS)、[GDDS](https://geodesy.noaa.gov/gps-toolbox/gdds.shtml)、[FAST](https://github.com/ChangChuntao/FAST)、[QGOPDD](https://github.com/yhw605/QGOPDD)、[gnss-downloader](https://github.com/Mereithhh/gnss-downloader)、[groops](https://github.com/groops-devs/groops)、[georb](https://github.com/Thomas-Loudis/georb)、[madocalib](https://github.com/QZSS-Strategy-Office/madocalib)、[OREKIT](https://link.zhihu.com/?target=https%3A//www.orekit.org/)、[rt-clk-service](https://github.com/DoubleString/rt-clk-service)、[polaris](https://github.com/PointOneNav/polaris)、[gnss-tec](https://github.com/gnss-lab/gnss-tec)、[utm](https://github.com/sfegan/utm)、[PW-from-GPS](https://github.com/ZiskinZiv/PW_from_GPS)、[GNSS-Multipath-Analysis-Software](https://github.com/paarnes/GNSS_Multipath_Analysis_Software)、[gnss-multipath-detector](https://github.com/EvgeniiMunin/gnss-multipath-detector)、[GNSS-Shadowing](https://github.com/xaedes/GNSS-Shadowing)、[gnssIR-python](https://github.com/kristinemlarson/gnssIR_python)、[GARNO](https://github.com/geoios/GARNO)、[GPSPACE](https://github.com/CGS-GIS/GPSPACE)、[GNSSDataQC](https://github.com/GNSS-FUN/GNSSDataQC)、[gnssr-synth](https://github.com/purnelldj/gnssr_synth)、[gnssIR-matlab-v3](https://github.com/kristinemlarson/gnssIR_matlab_v3)、[gnssrefl](https://github.com/kristinemlarson/gnssrefl)、[gnss2tws-green](https://github.com/jzshhh/gnss2tws_green)、[gnssSNR](https://github.com/kristinemlarson/gnssSNR)、[GNSS-IR](https://github.com/CSolgaard/GNSS-IR)、[mphw](https://github.com/fgnievinski/mphw)、[hgpt_model](https://github.com/pjmateus/hgpt_model)、[GNSSR_MERRByS](https://github.com/pjalesSSTL/GNSSR_MERRByS)、[PyGPSClient](https://github.com/semuconsulting/PyGPSClient)、[STM32Primer2-GNSS-Tracker](https://github.com/nemuisan/STM32Primer2_GNSS_Tracker)、[STM32-GNSS](https://github.com/SimpleMethod/STM32-GNSS)、[GNSSTimeServer](https://github.com/Montecri/GNSSTimeServer)、[GNSS_Clock](https://github.com/stevemarple/GNSS_Clock)、[AgOpenGPS](https://github.com/farmerbriantee/AgOpenGPS)、[nmea-msgs](https://github.com/ros-drivers/nmea_msgs)、[LilyGo-LoRa-Series](https://github.com/Xinyuan-LilyGO/LilyGo-LoRa-Series)、[HASlib](https://github.com/nlsfi/HASlib)、[HASPPP](https://github.com/ZhangRunzhi20/HASPPP)、[NavDecoder](https://github.com/NavSesne/NavDecoder)、[OSNMA](https://github.com/Algafix/OSNMA)、[galileo-osnma](https://github.com/daniestevez/galileo-osnma)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[geodetic_utils](https://github.com/ethz-asl/geodetic_utils)、[ppp-tools](https://github.com/aewallin/ppp-tools)、[gpstest](https://github.com/barbeau/gpstest)、[iSniff-GPS](https://github.com/hubert3/iSniff-GPS)、[hypatia](https://github.com/snkas/hypatia)、[gps-measurement-tools](https://github.com/google/gps-measurement-tools)、[FE-GUT](https://github.com/zhaoqj23/FE-GUT)、[gnss-RX](https://github.com/HeryMwenegoha/gnss-RX)、[Pypredict](https://github.com/spel-uchile/Pypredict)、[novatel-gps-driver](https://github.com/swri-robotics/novatel_gps_driver)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[GNSS-Radar](https://github.com/taroz/GNSS-Radar)、[geodesy_modeling](https://github.com/kmaterna/geodesy_modeling)、[gnss-odometry](https://github.com/mgoar/gnss-odometry)、[Caster_Project](https://github.com/KOROyo123/Caster_Project)、[rviz_satellite](https://github.com/nobleo/rviz_satellite)、[gnatss](https://github.com/seafloor-geodesy/gnatss)、[gnssr_lowcost](https://github.com/purnelldj/gnssr_lowcost)、[satellite-position-calculation-mapping](https://github.com/egemengulpinar/satellite-position-calculation-mapping)、[SatellitePosition](https://github.com/LStudioLoren/SatellitePosition)、[GNSSTool](https://github.com/quectel-open-source/GNSSTool)、[pynex](https://github.com/swift-nav/pynex)、[pygnssutils](https://github.com/semuconsulting/pygnssutils)、[flipperzero-gps](https://github.com/ezod/flipperzero-gps)、[ROS-GPS](https://github.com/sigmaai/ROS-GPS)、[rtk-rs](https://github.com/rtk-rs)、[ge-gnss-visibility](https://github.com/taroz/ge-gnss-visibility)、[OpenRTK](https://github.com/AndreasArendt/OpenRTK)、[GNSS_RTK](https://github.com/SupakunZ/GNSS_RTK)、[LEOGPS](https://github.com/sammmlow/LEOGPS)、[GPSToolbox 投稿](https://geodesy.noaa.gov/gps-toolbox/exist.htm)、[barbeau-awesome-gnss 整理](https://github.com/barbeau/awesome-gnss)、[hdkarimi-awesome-gnss 整理](https://github.com/hdkarimi/awesome-gnss)、[mcraymer 整理](https://mcraymer.github.io/geodesy/index.html)、[Awesome-Geospatial 整理](https://github.com/sacridini/Awesome-Geospatial)、[GISResourcce 整理](https://gisresources.com/) |
| **[GNSS 信号处理](导航定位建图开源项目记录.md#GNSS-Signal)** | **[GNSS-SDR](https://github.com/gnss-sdr/gnss-sdr)**、[gnss-sdr-monitor](https://github.com/acebrianjuan/gnss-sdr-monitor)、**[SoftGNSS](https://github.com/kristianpaul/SoftGNSS)**、[SoftGNSS-python](https://github.com/perrysou/SoftGNSS-python)、**[PocketSDR](https://github.com/tomojitakasu/PocketSDR)**、[GNSS-SDRLIB](https://github.com/taroz/GNSS-SDRLIB)、[nut2nt](https://github.com/amungo/nut2nt)、[Beagle_SDR_GPS](https://github.com/jks-prv/Beagle_SDR_GPS)、[KiwiSDR](https://forum.kiwisdr.com/)、[FlyDog-SDR-GPS](https://github.com/flydog-sdr/FlyDog_SDR_GPS)、[FlyCat-SDR-GPS](https://github.com/flydog-sdr/FlyCat_SDR_GPS)、[Full_Stack_GPS_Receiver](https://github.com/hamsternz/Full_Stack_GPS_Receiver)、[BDS-3-B1C-B2a-SDR-receiver](https://github.com/lyf8118/BDS-3-B1C-B2a-SDR-receiver)、[FGI-GSRx](https://github.com/nlsfi/FGI-GSRx)、[gypsum](https://github.com/codyd51/gypsum)、[sydr](https://github.com/aproposorg/sydr)、[NavLab-DPE-SDR](https://github.com/Stanford-NavLab/NavLab-DPE-SDR)、[multi-channel-gnss](https://github.com/dasdboot/multi-channel-gnss)、[GPUAcceleratedTracking](https://github.com/coezmaden/GPUAcceleratedTracking)、[GNSS-GPS-SDR](https://github.com/JiaoXianjun/GNSS-GPS-SDR)、[SDR-GPS-SPOOF](https://github.com/B44D3R/SDR-GPS-SPOOF)、[gps](https://github.com/psas/gps)、[SnapperGPS](https://snappergps.info/)、[snapshot-gnss-algorithms](https://github.com/JonasBchrt/snapshot-gnss-algorithms)、[gnss-sdr-1pps](https://github.com/oscimp/gnss-sdr-1pps)、[SatDump](https://github.com/SatDump/SatDump)、[gps-sdr-simulink](https://github.com/dmiralles2009/gps-sdr-simulink)、[gps-sdr-sim](https://github.com/osqzss/gps-sdr-sim)、[beidou-sdr-sim](https://github.com/yangfan852219770/beidou-sdr-sim)、[galileo-sdr-sim](https://github.com/harshadms/galileo-sdr-sim)、[gps-qzss-sdr-sim](https://github.com/iGNSS/gps-qzss-sdr-sim)、[multi-sdr-gps-sim](https://github.com/Mictronics/multi-sdr-gps-sim)、[pluto-gps-sim](https://github.com/Mictronics/pluto-gps-sim)、[SignalSim](https://github.com/globsky/SignalSim)、[Microsat-gps-sim](https://github.com/niklasknoell/Microsat-gps-sim)、[GPS_GAL_SSS](https://github.com/domonforyou/GPS_GAL_SSS)、[greta-oto](https://github.com/globsky/greta-oto)、[BD3_FPGA](https://github.com/whc2uestc/BD3_FPGA)、[GNSS-matlab](https://github.com/danipascual/GNSS-matlab)、[oresat-gps-software](https://github.com/oresat/oresat-gps-software)/[hardware](https://github.com/oresat/oresat-gps-hardware)、[MAX2769FT2232H](https://github.com/WKyleGilbertson/MAX2769FT2232H)、[SDR-GB-SAR](https://github.com/jmfriedt/SDR-GB-SAR)、[gps-rf-frontend-sim](https://github.com/iliasam/gps_rf_frontend_sim)、[GNSS-VHDL](https://github.com/danipascual/GNSS-VHDL)、[GNSS-Metadata-Standard](https://github.com/IonMetadataWorkingGroup/GNSS-Metadata-Standard)、[gnss-baseband](https://github.com/j-core/gnss-baseband)、[GPSMAXIM2769b-](https://github.com/vaidhyamookiah/GPSMAXIM2769b-)、[Analog-GPS-data-receiver](https://github.com/leaningktower/Analog-GPS-data-receiver)、[GNSS_Firehose](https://github.com/pmonta/GNSS_Firehose)、[GNSS-DSP-tools](https://github.com/pmonta/GNSS-DSP-tools)、[hard_sydr](https://github.com/aproposorg/hard_sydr)、[B1C-Signals-Simulation](https://github.com/pandaclover/B1C_Signals_Simulation)、[CU-SDR-Collection](https://github.com/gnsscusdr/CU-SDR-Collection)、[ESP32-SDR-GPS](https://github.com/iliasam/ESP32_SDR_GPS)、[STM32F4-SDR-GPS](https://github.com/iliasam/STM32F4_SDR_GPS)、[Fast-GNSS-ReceiverMATLAB](https://github.com/JohnBagshaw/Fast_GNSS_ReceiverMATLAB)、[gnss-sdr-rs](https://github.com/kewei/gnss-sdr-rs)、[sdr-beamforming](https://github.com/ADolbyB/sdr-beamforming)、[gr-gnMAX2769](https://github.com/wkazubski/gr-gnMAX2769)、[gps-sdr](https://github.com/gps-sdr/gps-sdr)、[GPSL1-DPEmodule](https://github.com/Sergio-Vicenzo/GPSL1-DPEmodule)、[esp2822_NMEA_sim](https://github.com/michalpelka/esp2822_NMEA_sim)、[BDS_SDR](https://github.com/nkyang/BDS_SDR) |
| **[INS、组合导航](导航定位建图开源项目记录.md#INS)** | [INS_Course_Matlab](https://github.com/LiZhengXiao99/INS_Course_Matlab)、**[PSINS](http://www.psins.org.cn/)**、[Android-PSINSToolbox](https://gitee.com/tmrnic/android-psinstoolbox)、[PSINS-ROS](https://github.com/BohemianRhapsodyz/PSINS-ROS)、[PSINS-Develop-Group](https://github.com/Cattle521/PSINS-Develop-Group)、[PSINS_FIMU](https://github.com/georgenwpu/PSINS_FIMU)、**[KF-GINS](https://github.com/i2Nav-WHU/KF-GINS)**、[KF_GINS_GUI](https://github.com/Wang-Jie-Lucid-Sheep/KF_GINS_GUI)、[py_IMU](https://github.com/Dennissy23/py_IMU)、**[OB-GINS](https://github.com/i2Nav-WHU/OB_GINS)**、**[TGINS](https://github.com/heiwa0519/TGINS)**、[PPPLIB](https://geodesy.noaa.gov/gps-toolbox/PPPLib.htm)、[Compass](https://gitee.com/hw_cc/compass)、[GINAV](https://github.com/kaichen686/GINav)/[v2.0](https://github.com/kaichen686/GINav_v2.0-test)、[IGNAV](https://github.com/Erensu/ignav)、[MATLAB-Groves](https://github.com/zbai/MATLAB-Groves)、[GIOW-release](https://github.com/i2Nav-WHU/GIOW-release)、[imu_x_fusion](https://github.com/cggos/imu_x_fusion)、[OpenIMU](https://github.com/introlab/OpenIMU)、[ronin](https://github.com/Sachini/ronin)、[RINS-W](https://github.com/mbrossar/RINS-W)、[invensense-imu](https://github.com/bolderflight/invensense-imu)、[eagleye](https://github.com/MapIV/eagleye)、[ai-imu-dr](https://github.com/mbrossar/ai-imu-dr)、[NaveCodePro](https://github.com/zelanzou/NaveCodePro)、[InertialNav](https://github.com/priseborough/InertialNav)、[allan-variance-ros](https://github.com/ori-drs/allan_variance_ros)、[eskf_localization](https://github.com/Arcanain/eskf_localization)、[imu_gnss_eskf](https://github.com/zouyajing/imu_gnss_eskf)、[nav_matlab](https://github.com/yandld/nav_matlab)、[imu_zupt](https://github.com/Fixit-Davide/imu_zupt)、[IEZ](https://github.com/pajaraca/IEZ)、[ZUPT-aided-INS](https://github.com/hcarlsso/ZUPT-aided-INS)、[gnss-ins-zupt](https://github.com/wvu-navLab/gnss-ins-zupt)、[corenav-GP](https://github.com/wvu-navLab/corenav-GP)、[kalibr](https://github.com/ethz-asl/kalibr)、[kalibr_allan](https://github.com/rpng/kalibr_allan)、[allan_variance_ros](https://github.com/ori-drs/allan_variance_ros)、[allan_variance](https://github.com/GAVLab/allan_variance)、[imu_allan](https://github.com/alalagong/imu_allan)、[allan_ros2](https://github.com/CruxDevStuff/allan_ros2)、[AdevAnalysis](https://github.com/itsuhane/AdevAnalysis)、[imu-data-simulation](https://github.com/robosu12/imu_data_simulation)、[GPS_IMU_Kalman_Filter](https://github.com/karanchawla/GPS_IMU_Kalman_Filter)、[TightlyCoupledINSGNSS](https://github.com/benzenemo/TightlyCoupledINSGNSS)、[stm32f4_mpu9250](https://github.com/suhetao/stm32f4_mpu9250)、[mpu6050](https://github.com/libdriver/mpu6050)、[mpu9250](https://github.com/libdriver/mpu9250)、[FastIMU](https://github.com/LiquidCGS/FastIMU)、[Wheel-INS ](https://github.com/i2Nav-WHU/Wheel-INS)、[GNSS-INS](https://github.com/hitleeleo/GNSS-INS)、[pyshoe](https://github.com/utiasSTARS/pyshoe)、[imu_tools](https://github.com/CCNYRoboticsLab/imu_tools)、[IMUCalibration-Gesture](https://github.com/shenshikexmu/IMUCalibration-Gesture)、[ImuCalibration-Poistion](https://github.com/shenshikexmu/ImuCalibration-Poistion)、[imu_utils](https://github.com/gaowenliang/imu_utils)、[GyroAllan](https://github.com/XinLiGH/GyroAllan)、[gnss-ins-sim](https://github.com/Aceinna/gnss-ins-sim)、[MEMS-IMU-Denoising](https://github.com/ansfl/MEMS-IMU-Denoising)、[agrobot](https://github.com/nesl/agrobot)、[IBG_EKF_TC](https://github.com/Dennissy23/IBG_EKF_TC)、[ZCJ-GNSSINS-DeepIntegration](https://github.com/kongtian-SiBu/ZCJ_GNSSINS_DeepIntegration)、[Smartphone-IMU-GPS](https://github.com/alexschultze/Smartphone_IMU_GPS)、[INSTINCT](https://github.com/UniStuttgart-INS/INSTINCT)、[Gait-Tracking](https://github.com/xioTechnologies/Gait-Tracking)、[Machine-Learning-GNSS-IMU-Integration](https://github.com/Akpozi/Machine_Learning_GNSS_IMU_Integration)、[ImuCalibration-Poistion](https://github.com/shenshikexmu/ImuCalibration-Poistion)、[ ADIS16470-Arduino-Teensy](https://github.com/juchong/ADIS16470_Arduino_Teensy)、[Seeed_ADIS16470](https://github.com/Seeed-Studio/Seeed_ADIS16470)、[iXR_GNSS-IMU_TightlyCouplingProgram](https://github.com/kakusang2020/iXR_GNSS-IMU_TightlyCouplingProgram)、[KalmanFilter_Vehicle_GNSS_INS](https://github.com/alirezaahmadi/KalmanFilter-Vehicle-GNSS-INS)、[GPS_Milemeter_IMU_EKFLocation](https://github.com/gilbertz/GPS_Milemeter_IMU_EKFLocation)、[IMUNet](https://github.com/BehnamZeinali/IMUNet)、[SmartIMU](https://github.com/KitSprout/SmartIMU)、[IMUSensorModels](https://github.com/hanley6/IMUSensorModels)、[imu_gps_localization](https://github.com/ydsf16/imu_gps_localization)、[dcm-imu](https://github.com/hhyyti/dcm-imu)、[denoise_imu_gyro](https://github.com/mbrossar/denoise-imu-gyro)、[vectornav](https://github.com/dawonn/vectornav)、[OpenIMUFilter](https://github.com/hustcalm/OpenIMUFilter)、[9DOF_Razor_IMU](https://github.com/sparkfun/9DOF_Razor_IMU)、[IMU_Attitude_Estimator](https://github.com/gaochq/IMU_Attitude_Estimator)、[SparkFun_LSM9DS1_Arduino_Library](https://github.com/sparkfun/SparkFun_LSM9DS1_Arduino_Library)、[imu_pipeline](https://github.com/ros-perception/imu_pipeline)、[ESEKF_IMU](https://github.com/aipiano/ESEKF_IMU)、[IMA-estimation](https://github.com/QIJINCHEN/IMA-estimation)、[fusion](https://github.com/Guo-ziwei/fusion)、[Indirect_EKF_IMU_GPS](https://github.com/hgpvision/Indirect_EKF_IMU_GPS)、[gps_imu_fusion](https://github.com/Shelfcol/gps_imu_fusion)、[imu_ekf](https://github.com/mrsp/imu_ekf)、[x-IMU-GUI](https://github.com/xioTechnologies/x-IMU-GUI)、[ekf-imu-depth](https://github.com/SenZHANG-GitHub/ekf-imu-depth)、[imu_tk_matlab](https://github.com/JzHuai0108/imu_tk_matlab)、[imu_tk](https://github.com/Kyle-ak/imu_tk)、[IMU_Preintegration](https://github.com/ujasmandavia/IMU_Preintegration)、[RTIMULib2](https://github.com/HongshiTan/RTIMULib2)、[imu_to_odom](https://github.com/nadiawangberg/imu_to_odom)、[imu-human-pose-pytorch](https://github.com/CHUNYUWANG/imu-human-pose-pytorch)、[IMU-Array](https://github.com/i2Nav-WHU/IMU-Array)、[IMUPoser](https://github.com/FIGLAB/IMUPoser)、[IMUDB](https://github.com/KleinYuan/IMUDB)、[har_with_imu_transformer](https://github.com/yolish/har-with-imu-transformer)、[EyeMU](https://github.com/FIGLAB/EyeMU)、[Attitude-Estimation](https://github.com/pms67/Attitude-Estimation)、[Activity_Detection_using_IMU_sensor](https://github.com/mohan-mj/Activity-Detection-using-IMU-sensor)、[lwoi](https://github.com/CAOR-MINES-ParisTech/lwoi)、[InvariantEKF_GNSS_IMU](https://github.com/mfkiwl/InvariantEKF_GNSS_IMU)、[imu_veh_calib](https://github.com/smallsunsun1/imu_veh_calib)、[ImuMeanFilter](https://github.com/XinLiGH/ImuMeanFilter)、[kalman_filter_with_kitti](https://github.com/motokimura/kalman_filter_with_kitti)、[ImuGpsGuiding](https://github.com/JackJu-HIT/ImuGpsGuiding)、[OpenSimRT](https://github.com/mitkof6/OpenSimRT)、[RTD_phone](https://github.com/milkytipo/RTD_phone)、[ADIS16470_Demo](https://github.com/wmdscjhdpy/ADIS16470_Demo)、[odom_predictor](https://github.com/ethz-asl/odom_predictor)、[robot_pose_ekf](https://github.com/udacity/robot_pose_ekf)、[UKF](https://github.com/krishnasandeep09/UKF)、[gnss-sensor-fusion](https://github.com/betaBison/gnss-sensor-fusion)、[amsi](https://github.com/weisongwen/amsi)、[EgoLocate](https://github.com/Xinyu-Yi/EgoLocate)、[learned_inertial_model_odometry](https://github.com/uzh-rpg/learned_inertial_model_odometry)、[MadgwickAHRS](https://github.com/arduino-libraries/MadgwickAHRS)、[integrated-navigation](https://github.com/XDDz123/integrated-navigation)、[KGP-IAEKF-IGGIII](https://github.com/chi-qhsun/KGP-IAEKF-IGGIII)、[navfusion](https://github.com/nvpadron/navfusion)、[Madgwick_Filter](https://github.com/bjohnsonfl/Madgwick_Filter)、[UrbanRTK-INS-OutlierOpt](https://github.com/Azurehappen/UrbanRTK-INS-OutlierOpt)、[SCH63T_MINI_EVK](https://github.com/tomojitakasu/SCH63T_MINI_EVK)、[GPS_IMU_Kalman_Filter](https://github.com/karanchawla/GPS_IMU_Kalman_Filter)、[Location](https://github.com/yyccR/Location)、[waypoint_nav](https://github.com/nickcharron/waypoint_nav)、[GIOW-release](https://github.com/i2Nav-WHU/GIOW-release)、[pyins](https://github.com/nmayorov/pyins)、[GINS-Navi](https://github.com/lewis5499/GINS-Navi)、[GNSS_INS_Integrations_Comparisons](https://github.com/ZhengdaoLI0602/GNSS_INS_Integrations_Comparisons)、[KF-GINS-ECEF](https://github.com/akui1321/KF-GINS-ECEF)、[TDL-GNSS](https://github.com/ebhrz/TDL-GNSS) |
| **[视觉 SLAM](导航定位建图开源项目记录.md#Vision)** | **[Vins-Mono](https://github.com/HKUST-Aerial-Robotics/VINS-Mono)/[Fusion](https://github.com/HKUST-Aerial-Robotics/VINS-Fusion)**、**[ORB-SLAM3](https://github.com/UZ-SLAMLab/ORB_SLAM3)**/[2](https://github.com/raulmur/ORB_SLAM2)/[1](https://github.com/raulmur/ORB_SLAM)、[OpenVINS](https://github.com/rpng/open_vins)、[Openvslam](https://github.com/xdspacelab/openvslam)、[svo](https://github.com/uzh-rpg/rpg_svo)、[svo_pro](https://github.com/uzh-rpg/rpg_svo_pro_open)、[msckf_vio](https://github.com/KumarRobotics/msckf_vio)、[okvis](https://github.com/ethz-asl/okvis)、[DM-VIO](https://github.com/lukasvst/dm-vio)、[DSO](https://github.com/JakobEngel/dso)、[DSOL](https://github.com/versatran01/dsol)、[wildnav](https://github.com/TIERS/wildnav)、[NeRF](https://github.com/bmild/nerf)、[H3](https://github.com/SYSU-STAR/H3-Mapping)/[H2-Mapping](https://github.com/SYSU-STAR/H2-Mapping)、[gaussian-splatting](https://github.com/graphdeco-inria/gaussian-splatting)、[2d-gaussian-splatting](https://github.com/hbb1/2d-gaussian-splatting)、[Elasticfusion](https://github.com/mp3guy/ElasticFusion)、[OpenMVG](https://github.com/openMVG/openMVG)、[Meshroom](https://github.com/alicevision/Meshroom)、[Kintinuous](https://github.com/mp3guy/Kintinuous)、[Mvision](https://github.com/Ewenwan/MVision)、[rgbdslam_v2](https://github.com/felixendres/rgbdslam_v2)、[camera_calibration](https://github.com/puzzlepaint/camera_calibration)、[crisp](https://github.com/hovren/crisp)、[VideoIMUCapture-Android](https://github.com/DavidGillsjo/VideoIMUCapture-Android)、[OpenImuCameraCalibrator](https://github.com/urbste/OpenImuCameraCalibrator)、[Structure-SLAM-PointLine](https://github.com/yanyan-li/Structure-SLAM-PointLine)、[SLAM_interface](https://github.com/Tompson11/SLAM_interface)、[Sync_Pola_IMU_ROS](https://github.com/BlanchonMarc/Sync_Pola_IMU_ROS)、[ViDAR](https://github.com/OpenDriveLab/ViDAR)、[BEVFormer](https://github.com/fundamentalvision/BEVFormer)、[aruco_ekf_slam](https://github.com/ydsf16/aruco_ekf_slam)、[ AVP-SLAM-SIM](https://github.com/TurtleZhong/AVP-SLAM-SIM)、[MSCKF_VIO_MONO](https://github.com/UMiNS/MSCKF_VIO_MONO)、[VIW-Fusion](https://github.com/TouchDeeper/VIW-Fusion)、[awesome-visual-slam 整理](https://github.com/tzutalin/awesome-visual-slam)、[Recent_SLAM_Research 整理](https://github.com/YiChenCityU/Recent_SLAM_Research)、[Awesome CV Works 整理](https://vincentqin.tech/posts/awesome-works/)、[Lee-SLAM-source 整理](https://github.com/AlbertSlam/Lee-SLAM-source)、[Awesome-SLAM 整理](https://github.com/SilenceOverflow/Awesome-SLAM)、[awesome-slam 整理](https://github.com/kanster/awesome-slam)、[Awesome_Dynamic_SLAM 整理](https://github.com/zhuhu00/Awesome_Dynamic_SLAM)、[awesome-NeRF 整理](https://github.com/awesome-NeRF/awesome-NeRF)、[visual-slam-roadmap 整理](https://github.com/changh95/visual-slam-roadmap)、[Visual_SLAM_Related_Research 整理](https://github.com/wuxiaolang/Visual_SLAM_Related_Research)、[vins-application 整理](https://github.com/engcang/vins-application)、[Recent-Stars-2024 整理](https://github.com/Vincentqyw/Recent-Stars-2024)、[Visual Navigation 整理](https://paperswithcode.com/task/visual-navigation)、[Awesome-Optical-Flow 整理](https://github.com/hzwer/Awesome-Optical-Flow)、[awesome-Implicit-NeRF-SLAM 整理](https://github.com/DoongLi/awesome-Implicit-NeRF-SLAM)、[awesome-computer-vision 整理](https://github.com/jbhuang0604/awesome-computer-vision)、[awesome-semantic-segmentation 整理](https://github.com/mrgloom/awesome-semantic-segmentation)、[awesome_3d_slam_resources 整理](https://github.com/qxiaofan/awesome_3d_slam_resources)、[awesome-road-environment-segmentation 整理](https://github.com/DaveLogs/awesome-road-environment-segmentation)、[Awesome-BEV-Perception-Multi-Cameras 整理](https://github.com/chaytonmin/Awesome-BEV-Perception-Multi-Cameras) |
diff --git "a/\345\205\254\344\274\227\345\217\267\346\235\202\346\226\207/01-\346\216\250\350\215\220\344\270\211\346\254\276\345\233\275\345\206\205\347\232\204\345\274\200\346\272\220GNSS\346\225\260\346\215\256\345\222\214\344\272\247\345\223\201\344\270\213\350\275\275\350\275\257\344\273\266\357\274\232GAMP-GOOD\343\200\201FAST\343\200\201GDDS.md" "b/\345\205\254\344\274\227\345\217\267\346\235\202\346\226\207/01-\346\216\250\350\215\220\344\270\211\346\254\276\345\233\275\345\206\205\347\232\204\345\274\200\346\272\220GNSS\346\225\260\346\215\256\345\222\214\344\272\247\345\223\201\344\270\213\350\275\275\350\275\257\344\273\266\357\274\232GAMP-GOOD\343\200\201FAST\343\200\201GDDS.md"
new file mode 100644
index 0000000..97d7ca9
--- /dev/null
+++ "b/\345\205\254\344\274\227\345\217\267\346\235\202\346\226\207/01-\346\216\250\350\215\220\344\270\211\346\254\276\345\233\275\345\206\205\347\232\204\345\274\200\346\272\220GNSS\346\225\260\346\215\256\345\222\214\344\272\247\345\223\201\344\270\213\350\275\275\350\275\257\344\273\266\357\274\232GAMP-GOOD\343\200\201FAST\343\200\201GDDS.md"
@@ -0,0 +1,269 @@
+
+
+# 推荐国内的三款开源 GNSS 数据和产品下载软件:GAMP-GOOD、FAST、GDDS
+
+数据下载是困扰 GNSS 初学者入门的一大麻烦事,在此推荐国内的三款开源软件(GAMP-GOOD、FAST、GDDS),希望能帮助大家解决 GNSS 数据下载的烦恼。
+
+三款软件都非常优秀,支持界面操作,支持下载 PPP 的所需的各种产品,支持下载 IGS、MGEX 的全球测站数据和 CUT、HK、NGS 等区域测站的数据,还可以在下载数据之后帮咱解压。
+
+三款软件各有千秋,GAMP-GOOD 精致,FAST 支持下载的数据最多,GDDS 功能最强大,可以都尝试尝试,然后选一个作为数据下载的主力软件,另外两个作为补充,发挥出这些工具最大的效用。
+
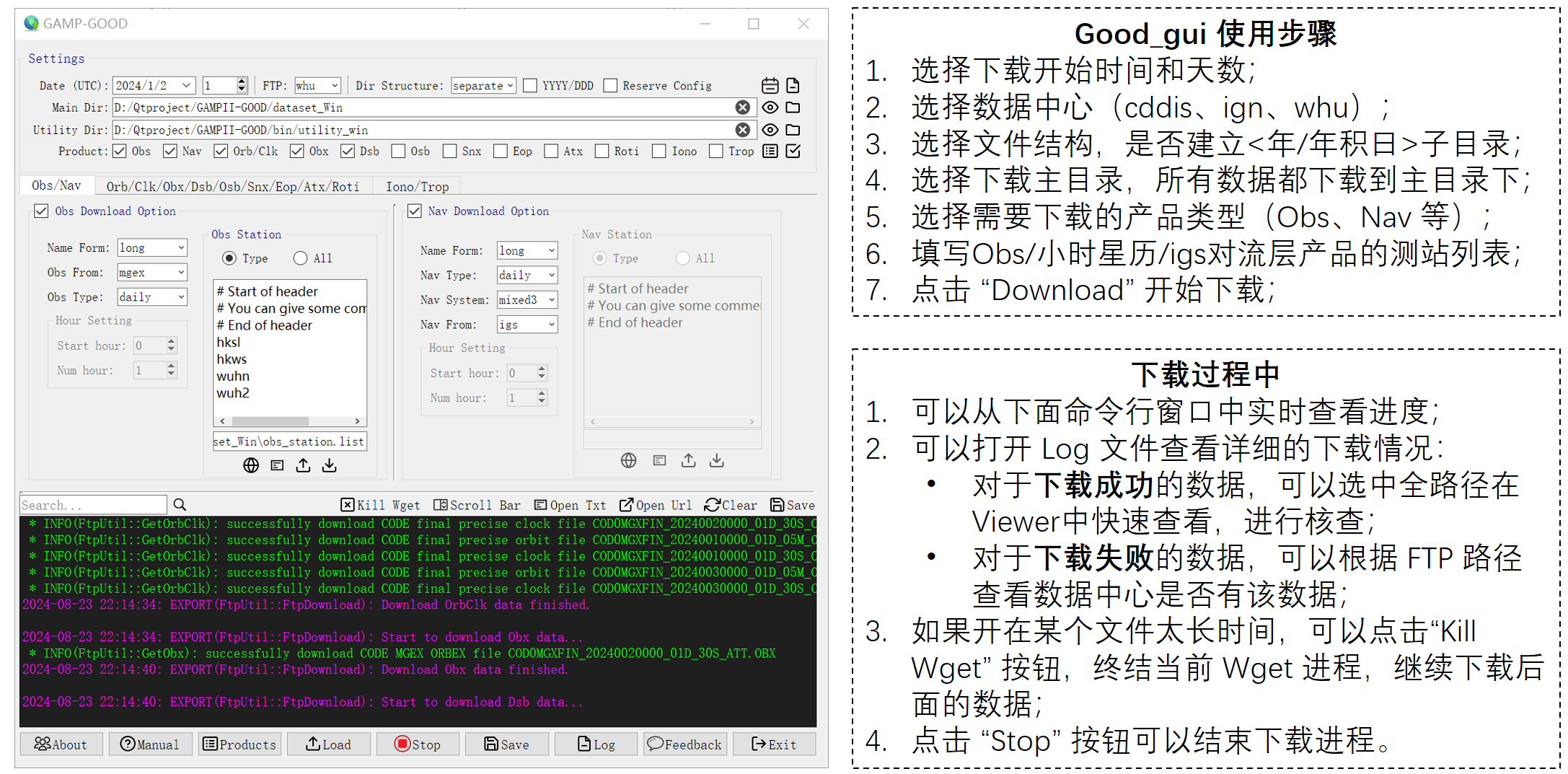
+GAMP-GOOD 是三款软件中开源最早的,一直在不断地优化与迭代,周锋老师做过三次直播分享,都有录播(一次在 Geososo 公众号,两次在 B 站)。之前版本只有命令行程序,用户需要通过修改配置文件来选择要下载的数据,较为繁琐;前段时间,周锋老师找我给它做了套界面,最新的 GAMP-GOOD4.0 版本由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt 界面可执行程序 Good_Gui 三部分组成。
+
+界面版程序的易用性相比命令行有了极大的提升,上手难度更低,选择数据更容易,还有更多可选择的文件结构;支持预览下载完成的数据,检查数据是否完整、观测数据有哪些频点;支持根据观测文件,下载对应的导航电文和 PPP 文件;日志输出中的文件路径、链接,可以直接选中跳转。
+
+但是受限于时间和能力,还有一些小 BUG 没有解决,暂时不支持中文路径,不支持下载快速和超快速的精密星历、精密钟差、电离层产品,文件下载失败时日志输出不完整。
+
+FAST 支持的数据种类最多,程序简单,易于拓展,武大近期开源的 GREAT-PVT 里面数据下载就是基于 FAST 实现的。它的命令行程序引导着用户一步步选择要下载的数据,上手容易;最新的程序支持数据质量分析和 SPP,支持批处理,而且绘图美观。
+
+GDDS 开源较晚,目前知名度不如前两款,但它的功能是极其强大的,下载完成试用了之后,我感到惊为天人,实现了很多我在给 GAMP-GOOD 做界面的时候,想做但是因为编程技术和时间的限制而没有实现的功能。最令我感到惊艳的功能是,用户还可以自定义链接格式,拼接出 ftp、http、https 链接,来下载给定的产品类型外的数据。
+
+
+
+
+
+
+
+
+
+
+
+| | GAMP-GOOD | FAST | GDDS |
+| :-------------: | :----------------------------------------------------------: | :----------------------------------------------------------: | :----------------------------------------------------------: |
+| **作者** | 周锋(山科)、李郑骁(安理工) | 常春涛(武大 GNSS 中心) | 卢立果(东华理工) |
+| **最新版本** | 4.0(Github 只更新到 3.1) | 3.0(Github 只更新到 2.11) | 1.2 |
+| **Github** | https://github.com/zhouforme0318/GAMPII-GOOD | https://github.com/ChangChuntao/FAST | https://github.com/LECUT/GDDS |
+| **GPS ToolBox** | 在投 | 准备投稿 | https://geodesy.noaa.gov/gps-toolbox/gdds.shtml |
+| **编程语言** | C++、Qt5 | Python、PyQt5 | Python、PyQt5 |
+| **软件形式** | 命令行 + 界面 | 命令行 + 界面 | 仅界面程序 |
+| **数据中心** | CDDIS、IGN、WHU | WHU | WHU、IGN、ESA、KASI、SIO、CDDIS |
+| **数据类型** | OBS、NAV、ORB、CLK、OBX、DSB、OSB、SNX、EOP、ATX、ROTI、IONO、TROP | OBS、NAV、ORB、CLK、OBX、DSB、OSB、SNX、EOP、ATX、IONO、VMF、TROP、Meteorology、CNES_AR、SLR、LEO、Time_series、Velocity_Fields、Panda、GAMIT(支持数据种类最多) | OBS、NAV、ORB、CLK、OBX、DSB、OSB、SNX、EOP、ATX、IONO、TROP、Time_series(除此以外,还可以添加自定义链接格式) |
+| **区域CORS** | HK、CUT、NGS、PBO、CHI、GA(GA 数据通过 Linux 脚本下载) | NGS、HK、GA(无法下载近三年 GA 数据) | NGS、EPN、SPAIN、JPN、HK、CUT、ARPREF |
+| **测站选择** | ①输入测站名;②上传测站列表文件 | ①输入测站名;②上传测站列表文件;③地图筛选指定卫星系统、天线名、经纬度范围内的数据; | 在给定的测站列表里选择 |
+| **测站地图** | 只能点击按钮跳转测站地图链接 | 可以在地图上绘制已选择的测站 | 调用百度地图 API 显示已选择的测站 |
+| **日期选择** | ①起止日期、②起始日期+天数 | 起止日期 | 起止日期 |
+| **下载路径** | 不支持中文路径(考完研我来改进)、目标路径不存在可以自动创建 | 支持中文路径、目标路径必须存在 | 支持中文路径、目标路径不存在可以自动创建 |
+| **信息输出** | 日志窗口 + 日志文件 | 日志窗口 | 日志文件 + 进度条 |
+| **使用教程** | README + Manual + PPT + 三场直播/录播讲解 + 控件提示 + 热心网友的博客 | README + 热心网友的博客 | Manual + 论文 |
+| **其它亮点** | ①可以同时下载多种数据,支持多层次的文件结构;②支持下载前后天的精密星历钟差;③日志输出层次清晰,不同级别用不同的颜色;命令行程序支持输出 wget 信息;④支持根据观测文件,下载对应的导航电文和 PPP 文件;⑤支持在程序中预览下载完成的数据,可以看看数据全不全,观测数据有哪些频点;⑥日志输出中的文件路径、链接,可以直接跳转; | ①支持并行下载数据,但是每次只能选择一种类型的数据,并行下载的功能大大受限;②最新的程序支持数据质量分析和 SPP,支持批处理,而且绘图美观;③支持的数据种类最多,而且各种数据类型通过下拉框来展示,拓展较为容易;④命令行程上手容易,引导着用户一步步选择要下载的数据; | ①支持并行下载数据,比 FAST 更好的一点在于 GDDS 可以同时选择星历和观测、或者同时选择各种产品下载;②同种产品可选择的细分数据类型全面;③除了给定的产品类型外,用户还可以自定义链接格式,拼接出 ftp、http、https 链接;④源码注释完善,每个文件、每个代码段前面都有简要注释,拼接产品链接的那行代码前,还会在注释里给出一个链接的示例; |
+| **其它缺陷** | ①部分产品下载失败的时候,无法正常输出日志;②暂时无法下载快速、超快速的 ORB、CLK、IONO;③同种产品可选择的细分数据类型少,(比如某些产品 FIN 和 RAP 只支持其一,比如默认下载周解 SNX,不存在时才能下载天解);④界面程序的部分功能不直观,得看介绍才能明白要怎么用;⑤C++ 程序修改和拓展起来比 Python 更困难; | ①日期只能年月日分开输,不能通过日历选择;想输入年积日和 GPS 周,必须先通过左侧工具转为年月日; | ①下载完成之后不能自动解压;②点击下载界面就卡住无响应了,可能是因为没有开新的线程来执行下载操作,导致下载的线程阻塞了界面响应;③异常处理做的不充分,程序易崩溃; |
+
+
+
+
+
+## GAMP-GOOD
+
+GOOD 是三款软件中开源最早的,历经 15 个版本的迭代,一直在不断地优化迭代,最新的 GAMP-GOOD4.0 版本由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt 界面可执行程序 Good_Gui 三部分组成,实现了常用 GNSS 观测值、广播星历、精密卫星轨道和钟差、地球定向参数、卫星姿态ORBEX、DCB/DSB/OSB、SINEX周解、电离层和对流层延迟产品、天线相位中心等产品下载。
+
+
+
+| 数据类型 | 用处 |
+| :--------------------------------------: | :---------------------------------------: |
+| IGS观测数据 (RINEX 2.xx, 短文件名) | 多用于GPS定轨、估钟、PPP算法验证等 |
+| MGEX观测数据 (RINEX 3.xx, 长文件名) | 多用于多系统GNSS定轨、估钟、PPP算法验证等 |
+| 科廷科技大学短基线 CORS 观测值 | 多用于短基线RTK算法验证 |
+| 澳大利亚地球科学局 (GA) 观测值 | 多用于BDS-2/3 UPD估计、PPP算法验证等 |
+| 香港CORS观测值(RINEX 3.xx, 长文件名) | 多用于海潮、GNSS水汽、电离层延迟建模等 |
+| 广播星历 (yyg/yyn/yyp 等) | 多用于SPP、RTK解算中的卫星坐标与钟差计算 |
+| IGS 与 MGEX 各分析中心精密轨道和钟差产品 | 多用于PPP解算中的卫星轨道和钟差计算 |
+| 地球自转参数 | 多用于计算极潮改正 |
+| IGS SINEX周解/天解 | 多用作定位算法验证的参考坐标 |
+| CODE或MGEX差分码偏差 | 多用于改正伪距硬件延迟 |
+| 全球电离层图 (GIM) | 全球电离层延迟产品 |
+| 全球电离层闪烁 (ROTI) | 多用于电离层不规则体和闪烁研究 |
+| CNES离线实时轨道/钟差/相位小数偏差产品 | 用于实时PPP算法验证、实时PPP模糊度固定等 |
+| IGS天线相位中心改正 (ANTEX) | 用于卫星和接收机天线相位中心改正 |
+
+
+
+
+
+
+
+## 附录:常用 GNSS 数据下载链接
+
+
+
+### 1、数据格式官方文档
+
+```
+- [Rinex2.11] : https://files.igs.org/pub/data/format/rinex211.txt
+- [Rinex3.05] : https://files.igs.org/pub/data/format/rinex305.pdf
+- [Rinex4.01] : https://files.igs.org/pub/data/format/rinex_4.01.pdf
+- [DCB/BSX] : https://files.igs.org/pub/data/format/sinex_bias_100.pdf
+- [SP3] : https://files.igs.org/pub/data/format/sp3d.pdf
+- [CLK] : https://files.igs.org/pub/data/format/rinex_clock304.txt
+- [ERP] : https://files.igs.org/pub/data/format/erp.txt
+- [SINEX] : https://www.iers.org/SharedDocs/Publikationen/EN/IERS/Documents/ac/sinex/sinex_v202_pdf
+- [Trop] : https://files.igs.org/pub/data/format/sinex_tro_v2.00.pdf
+- [GIM/Roti] : https://files.igs.org/pub/data/format/ionex1.pdf
+- [ANTEX] : https://files.igs.org/pub/data/format/antex14.txt
+```
+
+### 2、 IGS 数据中心
+
+```
+- [WHU (China)] : ftp://igs.gnsswhu.cn
+- [IGN (France)] : ftp://igs.ign.fr
+- [ESA (Europe)] : ftp://gssc.esa.int
+- [KASI (Korea)] : ftp://nfs.kasi.re.kr
+- [SIO (USA)] : ftp://lox.ucsd.edu
+- [CDDIS (USA)] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss
+```
+
+### 3、 区域 CORS
+
+```
+- [USA CORS] : https://geodesy.noaa.gov
+- [Europe EPN] : ftp://ftp.epncb.oma.be
+- [Spain CORS] : http://ftp.itacyl.es
+- [Japan JPN] : ftp://mgmds01.tksc.jaxa.jp
+- [Hong Kong CORS] : ftp://ftp.geodetic.gov.hk
+- [Curtin University] : http://gnss.curtin.edu.au
+- [Australia APREF] : ftp://ftp.data.gnss.ga.gov.au
+- [pbo] : https://data.unavco.org/archive/gnss/highrate
+- [chi] : https://gps.csn.uchile.cl/data/
+```
+
+### 4、 CDDIS 下载链接
+
+```
+- [IGS daily observation (30s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+- [IGS hourly observation (30s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/hourly
+- [IGS high-rate observation (1s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/highrate
+- [MGEX daily observation (30s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+- [MGEX hourly observation (30s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/hourly
+- [MGEX high-rate observation (1s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/highrate
+- [broadcast ephemeris files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+- [IGS SP3 files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+- [IGS CLK files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+- [IGS EOP files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+- [IGS weekly SINEX files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+- [MGEX SP3 files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+- [MGEX CLK files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+- [MGEX ORBEX files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+- [MGEX DSB files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/bias
+- [MGEX OSB files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+- [global ionosphere map (GIM) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/ionex
+- [Rate of TEC index (ROTI) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/ionex
+- [IGS final tropospheric product files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/troposphere/zpd
+```
+
+### 5、 IGN 下载链接
+
+```
+- [IGS daily observation (30s) files] : ftp://igs.ign.fr/pub/igs/data
+- [IGS hourly observation (30s) files] : ftp://igs.ign.fr/pub/igs/data/hourly
+- [IGS high-rate observation (1s) files] : ftp://igs.ign.fr/pub/igs/data/highrate
+- [MGEX daily observation (30s) files] : ftp://igs.ign.fr/pub/igs/data
+- [MGEX hourly observation (30s) files] : ftp://igs.ign.fr/pub/igs/data/hourly
+- [MGEX high-rate observation (1s) files] : ftp://igs.ign.fr/pub/igs/data/highrate
+- [broadcast ephemeris files] : ftp://igs.ign.fr/pub/igs/data
+- [IGS SP3 files] : ftp://igs.ign.fr/pub/igs/products
+- [IGS CLK files] : ftp://igs.ign.fr/pub/igs/products
+- [IGS EOP files] : ftp://igs.ign.fr/pub/igs/products
+- [IGS weekly SINEX files] : ftp://igs.ign.fr/pub/igs/products
+- [MGEX SP3 files] : ftp://igs.ign.fr/pub/igs/products/mgex
+- [MGEX CLK files] : ftp://igs.ign.fr/pub/igs/products/mgex
+- [MGEX ORBEX files] : ftp://igs.ign.fr/pub/igs/products/mgex
+- [MGEX DSB files] : ftp://igs.ign.fr/pub/igs/products/mgex/dcb
+- [MGEX OSB files] : ftp://igs.ign.fr/pub/igs/products/mgex
+- [global ionosphere map (GIM) files] : ftp://igs.ign.fr/pub/igs/products/ionosphere
+- [Rate of TEC index (ROTI) files] : ftp://igs.ign.fr/pub/igs/products/ionosphere
+- [IGS final tropospheric product files] : ftp://igs.ign.fr/pub/igs/products/troposphere
+```
+
+### 6、 WHU 下载链接
+
+```
+- [IGS daily observation (30s) files] : ftp://igs.gnsswhu.cn/pub/gps/data/daily
+- [IGS hourly observation (30s) files] : ftp://igs.gnsswhu.cn/pub/gps/data/hourly
+- [IGS high-rate observation (1s) files] : ftp://igs.gnsswhu.cn/pub/highrate
+- [MGEX daily observation (30s) files] : ftp://igs.gnsswhu.cn/pub/gps/data/daily
+- [MGEX hourly observation (30s) files] : ftp://igs.gnsswhu.cn/pub/gps/data/hourly
+- [MGEX high-rate observation (1s) files] : ftp://igs.gnsswhu.cn/pub/highrate
+- [broadcast ephemeris files] : ftp://igs.gnsswhu.cn/pub/gps/data/daily
+- [IGS SP3 files] : ftp://igs.gnsswhu.cn/pub/gps/products
+- [IGS CLK files] : ftp://igs.gnsswhu.cn/pub/gps/products
+- [IGS EOP files] : ftp://igs.gnsswhu.cn/pub/gps/products
+- [IGS weekly SINEX files] : ftp://igs.gnsswhu.cn/pub/gps/products
+- [MGEX SP3 files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- [MGEX CLK files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- [MGEX ORBEX files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- [MGEX DSB files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex/dcb
+- [MGEX OSB files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- [global ionosphere map (GIM) files] : ftp://igs.gnsswhu.cn/pub/gps/products/ionex
+- [Rate of TEC index (ROTI) files] : ftp://igs.gnsswhu.cn/pub/gps/products/ionex
+- [IGS final tropospheric product files] : ftp://igs.gnsswhu.cn/pub/gps/products/troposphere/new
+```
+
+### 7、 各种产品下载链接
+
+```
+- 【Obs】
+ - 【igs/mgex/igm】
+ -
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+ - ftp://igs.ign.fr/pub/igs/data
+ - ftp://igs.gnsswhu.cn/pub/gps/data/daily
+ -
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/hourly
+ - ftp://igs.ign.fr/pub/igs/data/hourly
+ - ftp://igs.gnsswhu.cn/pub/gps/data/hourly
+ -
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/highrate
+ - ftp://igs.ign.fr/pub/igs/data/highrate
+ - ftp://igs.gnsswhu.cn/pub/highrate
+ - 【cut】: http://saegnss2.curtin.edu/ldc/rinex3/daily
+ - 【hk】 <30s / 5s/ 1s>: https://rinex.geodetic.gov.hk
+ - 【ngs】: https://noaa-cors-pds.s3.amazonaws.com/rinex
+ - 【epn】: ftp://ftp.epncb.oma.be/pub/obs
+ - 【pbo】: https://data.unavco.org/archive/gnss/highrate
+ - 【chi】: https://gps.csn.uchile.cl/data/
+- 【Nav】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+ - ftp://igs.ign.fr/pub/igs/data
+ - ftp://igs.gnsswhu.cn/pub/gps/data/daily
+ - ftp://ftp.pecny.cz/LDC/orbits_brd/gop3
+ - https://igs.bkg.bund.de/root_ftp/IGS/BRDC
+- 【Orb/Clk】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+ - ftp://igs.ign.fr/pub/igs/products
+ - ftp://igs.gnsswhu.cn/pub/gps/products
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+ - ftp://igs.ign.fr/pub/igs/products/mgex
+ - ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- 【Obx】
+- 【Dsb / Osb】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+ - ftp://igs.ign.fr/pub/igs/products
+ - ftp://igs.gnsswhu.cn/pub/gps/products
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+ - ftp://igs.ign.fr/pub/igs/products/mgex
+ - ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- 【Snx】
+- 【Iono】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/ionex
+ - ftp://igs.ign.fr/pub/igs/products/ionosphere
+ - ftp://igs.gnsswhu.cn/pub/gps/products/ionex
+- 【Trop】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/tropo sphere/zpd
+ - ftp://igs.ign.fr/pub/igs/products/troposphere
+ - ftp://igs.gnsswhu.cn/pub/gps/products/troposphere/new
+ - ftp://ftp.aiub.unibe.ch/CODE
+- 【Eop】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+ - ftp://igs.ign.fr/pub/igs/products
+ - ftp://igs.gnsswhu.cn/pub/gps/products
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+ - ftp://igs.ign.fr/pub/igs/products/mgex
+ - ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- 【Atx】
+ - https://files.igs.org/pub/station/general/
+- 【Roti】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/ionex
+ - ftp://igs.ign.fr/pub/igs/products/ionosphere
+ - ftp://igs.gnsswhu.cn/pub/gps/products/ionex
+```
+
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2013-\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2013-\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf"
deleted file mode 100644
index cdccfb5..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2013-\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf"
deleted file mode 100644
index 7af4767..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf"
deleted file mode 100644
index 474f9d6..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf"
deleted file mode 100644
index 35ae246..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf"
deleted file mode 100644
index c673862..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf"
deleted file mode 100644
index 73b19af..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf"
deleted file mode 100644
index 2534269..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf"
deleted file mode 100644
index f97ac7a..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf"
deleted file mode 100644
index 121c34c..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf"
deleted file mode 100644
index 64a81b8..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf"
deleted file mode 100644
index f1da228..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf"
deleted file mode 100644
index b044a76..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf"
deleted file mode 100644
index 95af102..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf"
deleted file mode 100644
index 2f452c5..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf"
deleted file mode 100644
index 1063099..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf"
deleted file mode 100644
index 76a1441..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf"
deleted file mode 100644
index 770b6e5..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf"
deleted file mode 100644
index 975f2fe..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf"
deleted file mode 100644
index 3f37b11..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf"
deleted file mode 100644
index 29ac85c..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf"
deleted file mode 100644
index 4b0a2fd..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf"
deleted file mode 100644
index fcf3dce..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf"
deleted file mode 100644
index f0d830a..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf"
deleted file mode 100644
index 47a84c0..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf"
deleted file mode 100644
index b2cd279..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf"
deleted file mode 100644
index 433cff5..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf"
deleted file mode 100644
index 5ed90c2..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf"
deleted file mode 100644
index c2aca57..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf"
deleted file mode 100644
index 1600e63..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf"
deleted file mode 100644
index 4ba869a..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf"
deleted file mode 100644
index 730e301..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf"
deleted file mode 100644
index f87972b..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf"
deleted file mode 100644
index d38ff9e..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf" and /dev/null differ
diff --git "a/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md"
index f326a22..4138542 100644
--- "a/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md"
+++ "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md"
@@ -203,8 +203,6 @@ TIA 输出幅度很小(<200 mV)的模拟信号,而 TDC 则需要数字信
因此,这是激光雷达的最终方案:
-
-
激光雷达印刷电路板的跟踪并不容易,因为电路板上的激光节点含有超过 15A 的电流,光电二极管节点含有微安培的光电流。我决定制作一个四层电路板,因为这是组织高质量接地多边形的唯一方法--在四层电路板的情况下,内层之一仅用于接地多边形。从原理图中可以看到,我将所有激光雷达接地分为三种类型--激光节点接地 (LGND)、电机节点接地 (MGND)、主接地多边形 (GND)。这些地线只连接了几个点。为了减少激光器电路中的电感,必须将激光器 D4、晶体管 Q2、R19 和 C17 放在尽可能靠近的位置 - 事实上,当激光器打开时,通过这些元件的电流是短路的。
激光雷达印刷电路板的跟踪并不容易,因为电路板上的激光节点含有超过 15A 的电流,光电二极管节点含有微安培的光电流。我决定制作一个四层电路板,因为这是组织高质量接地多边形的唯一方法--在四层电路板的情况下,内层之一仅用于接地多边形。从原理图中可以看到,我将所有激光雷达接地分为三种类型--激光节点接地 (LGND)、电机节点接地 (MGND)、主接地多边形 (GND)。这些地线只连接了几个点。
- **圆圈**:**变量节点**,表示系统待估计的状态,对应一个变量 $x$ 。
- **正方形**:**因子节点**,表示先验信息、状态转移和量测过程,对应一个局部函数 $f$ ,其中:
diff --git "a/Cover/NaviCode \345\260\217\345\267\245\345\214\240\345\205\254\344\274\227\345\217\267.png" "b/Cover/NaviCode \345\260\217\345\267\245\345\214\240\345\205\254\344\274\227\345\217\267.png"
new file mode 100644
index 0000000..aca68b0
Binary files /dev/null and "b/Cover/NaviCode \345\260\217\345\267\245\345\214\240\345\205\254\344\274\227\345\217\267.png" differ
diff --git a/README.md b/README.md
index 8fc2b4f..ec483fc 100644
--- a/README.md
+++ b/README.md
@@ -133,7 +133,7 @@
| 类型 | 项目/网址 |
| :----------------------------------------------------------: | :----------------------------------------------------------: |
-| [**GNSS 数据处理**](导航定位建图开源项目记录.md#GNSS) | **[RTKLIB](https://www.rtklib.com/)**、[RTKLIB-Demo5](https://github.com/rtklibexplorer/RTKLIB)、[learning_rtklib](https://github.com/LiZhengXiao99/learning_rtklib)、[rtklib-py](https://github.com/rtklibexplorer/rtklib-py)、[pyrtklib](https://github.com/IPNL-POLYU/pyrtklib)、[GPS-RTKLIB-ARM-F407VG](https://github.com/ngochieu642/GPS-RTKLIB-ARM-F407VG)、[MALIB](https://github.com/JAXA-SNU/MALIB)、[MatRTKLIB](https://github.com/taroz/MatRTKLIB)、[Taroz-gsdc2023](https://github.com/taroz/gsdc2023)、[CSSRLib](https://github.com/hirokawa/cssrlib)、[rtklib_ros_bridge](https://github.com/MapIV/rtklib_ros_bridge)、[FiPPP](https://github.com/HuChao-gnss/FiPPP)、[rtkrcv_ros](https://github.com/ajbfinesc/rtkrcv_ros)、**[GAMP](https://geodesy.noaa.gov/gps-toolbox/GAMP.htm)**、[GAMPII-GOOD](https://github.com/zhouforme0318/GAMPII-GOOD)、**[Ginan](https://github.com/GeoscienceAustralia/ginan)**、**[goGPS](https://github.com/goGPS-Project/goGPS_MATLAB)**、[goGPS_Java](https://github.com/goGPS-Project/goGPS_Java)、[BNC](https://igs.bkg.bund.de/ntrip/bnc)、[GREAT-PVT](https://github.com/GREAT-WHU/GREAT-PVT)、[GFZRNX](https://dataservices.gfz-potsdam.de/panmetaworks/showshort.php?id=escidoc:1577894)、[GNSSLogger](https://github.com/google/gps-measurement-tools)、[georinex](https://github.com/geospace-code/georinex)、[GAMIT/GLOBK](http://geoweb.mit.edu/gg/)、[GraphGNSSLib](https://github.com/weisongwen/GraphGNSSLib)、[NavCodeMonitor](https://github.com/weisongwen/NavCodeMonitor)、[Net_Diff](https://github.com/YizeZhang/Net_Diff)、[laika](https://github.com/commaai/laika)、[CSRS-PPP](https://webapp.csrs-scrs.nrcan-rncan.gc.ca/geod/tools-outils/ppp.php)、[POSGO](https://github.com/lizhengnss/POSGO)、[Pride-PPPAR](https://github.com/PrideLab/PRIDE-PPPAR)、[PPPwizard](http://www.ppp-wizard.net/)、[GPSTk](https://github.com/SGL-UT/GPSTk)、[gnsstk](https://github.com/SGL-UT/gnsstk)、[gnsstk-apps](https://github.com/SGL-UT/gnsstk-apps)、[G-NUT/Anubis](https://www.pecny.cz/Joomla25/index.php/gnss/sw/anubis)、[Teqc](https://www.unavco.org/software/data-processing/teqc/teqc.html)、[RNXQCE](https://github.com/cuizilu/RNXQCE)、[Bernese](https://www.bernese.unibe.ch/)、[gLAB](https://github.com/valgur/gLAB?tab=readme-ov-file)、[Look4Sat](https://github.com/rt-bishop/Look4Sat)、[RobustGNSS](https://github.com/wvu-navLab/RobustGNSS)、[ntrip](https://github.com/sevensx/ntrip)、[rtcm](https://github.com/Node-NTRIP/rtcm)、[cors](https://github.com/Erensu/cors)、[VrsCaster](https://github.com/DoubleString/VrsCaster)、[gstream](https://github.com/Jin-Whu/gstream)、[ogrp](https://github.com/Fraunhofer-IIS/ogrp)、[centipede](https://github.com/CentipedeRTK/centipede)、[TouchRTKStation](https://github.com/taroz/TouchRTKStation)、[rtkbase](https://github.com/Stefal/rtkbase)、[GREAT-IFCB](https://github.com/GREAT-WHU/GREAT-IFCB)、[gnss_comm](https://github.com/HKUST-Aerial-Robotics/gnss_comm)、[PPP-BayesTree](https://github.com/wvu-navLab/PPP-BayesTree)、[gnsspy](https://github.com/GNSSpy-Project/gnsspy)、[gnssgo](https://github.com/FengXuebin/gnssgo)、[raPPPid](https://github.com/TUW-VieVS/raPPPid)、[gnss-compass-ros](https://github.com/MapIV/gnss_compass_ros)、[gnss-attitude](https://github.com/low-earth-orbit/gnss-attitude)、[FCB-FILES](https://github.com/FCB-SGG/FCB-FILES)、[MG_APP](https://github.com/XiaoGongWei/MG_APP)、[gps_amcl](https://github.com/midemig/gps_amcl)、[deep_gnss](https://github.com/Stanford-NavLab/deep_gnss)、[TSAnalyzer](https://github.com/wudingcheng/TSAnalyzer)、[GNSS-TimeSeries-Viewers](https://github.com/kmaterna/GNSS_TimeSeries_Viewers)、[RTKinGSS](https://github.com/shaolinbit/RTKinGSS)、[gnss_lib_py](https://github.com/Stanford-NavLab/gnss_lib_py)、[PNT-Integrity](https://github.com/cisagov/PNT-Integrity)、[GORS](https://github.com/lengyanyanjing/GORS)、[GDDS](https://geodesy.noaa.gov/gps-toolbox/gdds.shtml)、[FAST](https://github.com/ChangChuntao/FAST)、[QGOPDD](https://github.com/yhw605/QGOPDD)、[gnss-downloader](https://github.com/Mereithhh/gnss-downloader)、[groops](https://github.com/groops-devs/groops)、[georb](https://github.com/Thomas-Loudis/georb)、[madocalib](https://github.com/QZSS-Strategy-Office/madocalib)、[OREKIT](https://link.zhihu.com/?target=https%3A//www.orekit.org/)、[rt-clk-service](https://github.com/DoubleString/rt-clk-service)、[polaris](https://github.com/PointOneNav/polaris)、[gnss-tec](https://github.com/gnss-lab/gnss-tec)、[utm](https://github.com/sfegan/utm)、[PW-from-GPS](https://github.com/ZiskinZiv/PW_from_GPS)、[GNSS-Multipath-Analysis-Software](https://github.com/paarnes/GNSS_Multipath_Analysis_Software)、[gnss-multipath-detector](https://github.com/EvgeniiMunin/gnss-multipath-detector)、[GNSS-Shadowing](https://github.com/xaedes/GNSS-Shadowing)、[gnssIR-python](https://github.com/kristinemlarson/gnssIR_python)、[GARNO](https://github.com/geoios/GARNO)、[GPSPACE](https://github.com/CGS-GIS/GPSPACE)、[GNSSDataQC](https://github.com/GNSS-FUN/GNSSDataQC)、[gnssr-synth](https://github.com/purnelldj/gnssr_synth)、[gnssIR-matlab-v3](https://github.com/kristinemlarson/gnssIR_matlab_v3)、[gnssrefl](https://github.com/kristinemlarson/gnssrefl)、[gnss2tws-green](https://github.com/jzshhh/gnss2tws_green)、[gnssSNR](https://github.com/kristinemlarson/gnssSNR)、[mphw](https://github.com/fgnievinski/mphw)、[hgpt_model](https://github.com/pjmateus/hgpt_model)、[GNSSR_MERRByS](https://github.com/pjalesSSTL/GNSSR_MERRByS)、[PyGPSClient](https://github.com/semuconsulting/PyGPSClient)、[STM32Primer2-GNSS-Tracker](https://github.com/nemuisan/STM32Primer2_GNSS_Tracker)、[STM32-GNSS](https://github.com/SimpleMethod/STM32-GNSS)、[GNSSTimeServer](https://github.com/Montecri/GNSSTimeServer)、[GNSS_Clock](https://github.com/stevemarple/GNSS_Clock)、[AgOpenGPS](https://github.com/farmerbriantee/AgOpenGPS)、[nmea-msgs](https://github.com/ros-drivers/nmea_msgs)、[LilyGo-LoRa-Series](https://github.com/Xinyuan-LilyGO/LilyGo-LoRa-Series)、[HASlib](https://github.com/nlsfi/HASlib)、[HASPPP](https://github.com/ZhangRunzhi20/HASPPP)、[NavDecoder](https://github.com/NavSesne/NavDecoder)、[OSNMA](https://github.com/Algafix/OSNMA)、[galileo-osnma](https://github.com/daniestevez/galileo-osnma)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[geodetic_utils](https://github.com/ethz-asl/geodetic_utils)、[ppp-tools](https://github.com/aewallin/ppp-tools)、[gpstest](https://github.com/barbeau/gpstest)、[iSniff-GPS](https://github.com/hubert3/iSniff-GPS)、[hypatia](https://github.com/snkas/hypatia)、[gps-measurement-tools](https://github.com/google/gps-measurement-tools)、[FE-GUT](https://github.com/zhaoqj23/FE-GUT)、[gnss-RX](https://github.com/HeryMwenegoha/gnss-RX)、[Pypredict](https://github.com/spel-uchile/Pypredict)、[novatel-gps-driver](https://github.com/swri-robotics/novatel_gps_driver)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[GNSS-Radar](https://github.com/taroz/GNSS-Radar)、[geodesy_modeling](https://github.com/kmaterna/geodesy_modeling)、[gnss-odometry](https://github.com/mgoar/gnss-odometry)、[Caster_Project](https://github.com/KOROyo123/Caster_Project)、[rviz_satellite](https://github.com/nobleo/rviz_satellite)、[gnatss](https://github.com/seafloor-geodesy/gnatss)、[gnssr_lowcost](https://github.com/purnelldj/gnssr_lowcost)、[satellite-position-calculation-mapping](https://github.com/egemengulpinar/satellite-position-calculation-mapping)、[SatellitePosition](https://github.com/LStudioLoren/SatellitePosition)、[GNSSTool](https://github.com/quectel-open-source/GNSSTool)、[pynex](https://github.com/swift-nav/pynex)、[pygnssutils](https://github.com/semuconsulting/pygnssutils)、[flipperzero-gps](https://github.com/ezod/flipperzero-gps)、[ROS-GPS](https://github.com/sigmaai/ROS-GPS)、[rtk-rs](https://github.com/rtk-rs)、[ge-gnss-visibility](https://github.com/taroz/ge-gnss-visibility)、[OpenRTK](https://github.com/AndreasArendt/OpenRTK)、[GNSS_RTK](https://github.com/SupakunZ/GNSS_RTK)、[LEOGPS](https://github.com/sammmlow/LEOGPS)、[GPSToolbox 投稿](https://geodesy.noaa.gov/gps-toolbox/exist.htm)、[barbeau-awesome-gnss 整理](https://github.com/barbeau/awesome-gnss)、[hdkarimi-awesome-gnss 整理](https://github.com/hdkarimi/awesome-gnss)、[mcraymer 整理](https://mcraymer.github.io/geodesy/index.html)、[Awesome-Geospatial 整理](https://github.com/sacridini/Awesome-Geospatial)、[GISResourcce 整理](https://gisresources.com/) |
+| [**GNSS 数据处理**](导航定位建图开源项目记录.md#GNSS) | **[RTKLIB](https://www.rtklib.com/)**、[RTKLIB-Demo5](https://github.com/rtklibexplorer/RTKLIB)、[learning_rtklib](https://github.com/LiZhengXiao99/learning_rtklib)、[rtklib-py](https://github.com/rtklibexplorer/rtklib-py)、[pyrtklib](https://github.com/IPNL-POLYU/pyrtklib)、[GPS-RTKLIB-ARM-F407VG](https://github.com/ngochieu642/GPS-RTKLIB-ARM-F407VG)、[MALIB](https://github.com/JAXA-SNU/MALIB)、[MatRTKLIB](https://github.com/taroz/MatRTKLIB)、[Taroz-gsdc2023](https://github.com/taroz/gsdc2023)、[CSSRLib](https://github.com/hirokawa/cssrlib)、[rtklib_ros_bridge](https://github.com/MapIV/rtklib_ros_bridge)、[FiPPP](https://github.com/HuChao-gnss/FiPPP)、[rtkrcv_ros](https://github.com/ajbfinesc/rtkrcv_ros)、**[GAMP](https://geodesy.noaa.gov/gps-toolbox/GAMP.htm)**、[GAMPII-GOOD](https://github.com/zhouforme0318/GAMPII-GOOD)、**[Ginan](https://github.com/GeoscienceAustralia/ginan)**、**[goGPS](https://github.com/goGPS-Project/goGPS_MATLAB)**、[goGPS_Java](https://github.com/goGPS-Project/goGPS_Java)、[BNC](https://igs.bkg.bund.de/ntrip/bnc)、[GREAT-PVT](https://github.com/GREAT-WHU/GREAT-PVT)、[GFZRNX](https://dataservices.gfz-potsdam.de/panmetaworks/showshort.php?id=escidoc:1577894)、[GNSSLogger](https://github.com/google/gps-measurement-tools)、[georinex](https://github.com/geospace-code/georinex)、[GAMIT/GLOBK](http://geoweb.mit.edu/gg/)、[GraphGNSSLib](https://github.com/weisongwen/GraphGNSSLib)、[NavCodeMonitor](https://github.com/weisongwen/NavCodeMonitor)、[Net_Diff](https://github.com/YizeZhang/Net_Diff)、[laika](https://github.com/commaai/laika)、[CSRS-PPP](https://webapp.csrs-scrs.nrcan-rncan.gc.ca/geod/tools-outils/ppp.php)、[POSGO](https://github.com/lizhengnss/POSGO)、[Pride-PPPAR](https://github.com/PrideLab/PRIDE-PPPAR)、[PPPwizard](http://www.ppp-wizard.net/)、[GPSTk](https://github.com/SGL-UT/GPSTk)、[gnsstk](https://github.com/SGL-UT/gnsstk)、[gnsstk-apps](https://github.com/SGL-UT/gnsstk-apps)、[G-NUT/Anubis](https://www.pecny.cz/Joomla25/index.php/gnss/sw/anubis)、[Teqc](https://www.unavco.org/software/data-processing/teqc/teqc.html)、[RNXQCE](https://github.com/cuizilu/RNXQCE)、[Bernese](https://www.bernese.unibe.ch/)、[gLAB](https://github.com/valgur/gLAB?tab=readme-ov-file)、[Look4Sat](https://github.com/rt-bishop/Look4Sat)、[RobustGNSS](https://github.com/wvu-navLab/RobustGNSS)、[ntrip](https://github.com/sevensx/ntrip)、[rtcm](https://github.com/Node-NTRIP/rtcm)、[cors](https://github.com/Erensu/cors)、[VrsCaster](https://github.com/DoubleString/VrsCaster)、[gstream](https://github.com/Jin-Whu/gstream)、[ogrp](https://github.com/Fraunhofer-IIS/ogrp)、[centipede](https://github.com/CentipedeRTK/centipede)、[TouchRTKStation](https://github.com/taroz/TouchRTKStation)、[rtkbase](https://github.com/Stefal/rtkbase)、[GREAT-IFCB](https://github.com/GREAT-WHU/GREAT-IFCB)、[gnss_comm](https://github.com/HKUST-Aerial-Robotics/gnss_comm)、[PPP-BayesTree](https://github.com/wvu-navLab/PPP-BayesTree)、[gnsspy](https://github.com/GNSSpy-Project/gnsspy)、[gnssgo](https://github.com/FengXuebin/gnssgo)、[raPPPid](https://github.com/TUW-VieVS/raPPPid)、[gnss-compass-ros](https://github.com/MapIV/gnss_compass_ros)、[gnss-attitude](https://github.com/low-earth-orbit/gnss-attitude)、[FCB-FILES](https://github.com/FCB-SGG/FCB-FILES)、[MG_APP](https://github.com/XiaoGongWei/MG_APP)、[gps_amcl](https://github.com/midemig/gps_amcl)、[deep_gnss](https://github.com/Stanford-NavLab/deep_gnss)、[TSAnalyzer](https://github.com/wudingcheng/TSAnalyzer)、[GNSS-TimeSeries-Viewers](https://github.com/kmaterna/GNSS_TimeSeries_Viewers)、[RTKinGSS](https://github.com/shaolinbit/RTKinGSS)、[gnss_lib_py](https://github.com/Stanford-NavLab/gnss_lib_py)、[PNT-Integrity](https://github.com/cisagov/PNT-Integrity)、[GORS](https://github.com/lengyanyanjing/GORS)、[GDDS](https://geodesy.noaa.gov/gps-toolbox/gdds.shtml)、[FAST](https://github.com/ChangChuntao/FAST)、[QGOPDD](https://github.com/yhw605/QGOPDD)、[gnss-downloader](https://github.com/Mereithhh/gnss-downloader)、[groops](https://github.com/groops-devs/groops)、[georb](https://github.com/Thomas-Loudis/georb)、[madocalib](https://github.com/QZSS-Strategy-Office/madocalib)、[OREKIT](https://link.zhihu.com/?target=https%3A//www.orekit.org/)、[rt-clk-service](https://github.com/DoubleString/rt-clk-service)、[polaris](https://github.com/PointOneNav/polaris)、[gnss-tec](https://github.com/gnss-lab/gnss-tec)、[utm](https://github.com/sfegan/utm)、[PW-from-GPS](https://github.com/ZiskinZiv/PW_from_GPS)、[GNSS-Multipath-Analysis-Software](https://github.com/paarnes/GNSS_Multipath_Analysis_Software)、[gnss-multipath-detector](https://github.com/EvgeniiMunin/gnss-multipath-detector)、[GNSS-Shadowing](https://github.com/xaedes/GNSS-Shadowing)、[gnssIR-python](https://github.com/kristinemlarson/gnssIR_python)、[GARNO](https://github.com/geoios/GARNO)、[GPSPACE](https://github.com/CGS-GIS/GPSPACE)、[GNSSDataQC](https://github.com/GNSS-FUN/GNSSDataQC)、[gnssr-synth](https://github.com/purnelldj/gnssr_synth)、[gnssIR-matlab-v3](https://github.com/kristinemlarson/gnssIR_matlab_v3)、[gnssrefl](https://github.com/kristinemlarson/gnssrefl)、[gnss2tws-green](https://github.com/jzshhh/gnss2tws_green)、[gnssSNR](https://github.com/kristinemlarson/gnssSNR)、[GNSS-IR](https://github.com/CSolgaard/GNSS-IR)、[mphw](https://github.com/fgnievinski/mphw)、[hgpt_model](https://github.com/pjmateus/hgpt_model)、[GNSSR_MERRByS](https://github.com/pjalesSSTL/GNSSR_MERRByS)、[PyGPSClient](https://github.com/semuconsulting/PyGPSClient)、[STM32Primer2-GNSS-Tracker](https://github.com/nemuisan/STM32Primer2_GNSS_Tracker)、[STM32-GNSS](https://github.com/SimpleMethod/STM32-GNSS)、[GNSSTimeServer](https://github.com/Montecri/GNSSTimeServer)、[GNSS_Clock](https://github.com/stevemarple/GNSS_Clock)、[AgOpenGPS](https://github.com/farmerbriantee/AgOpenGPS)、[nmea-msgs](https://github.com/ros-drivers/nmea_msgs)、[LilyGo-LoRa-Series](https://github.com/Xinyuan-LilyGO/LilyGo-LoRa-Series)、[HASlib](https://github.com/nlsfi/HASlib)、[HASPPP](https://github.com/ZhangRunzhi20/HASPPP)、[NavDecoder](https://github.com/NavSesne/NavDecoder)、[OSNMA](https://github.com/Algafix/OSNMA)、[galileo-osnma](https://github.com/daniestevez/galileo-osnma)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[geodetic_utils](https://github.com/ethz-asl/geodetic_utils)、[ppp-tools](https://github.com/aewallin/ppp-tools)、[gpstest](https://github.com/barbeau/gpstest)、[iSniff-GPS](https://github.com/hubert3/iSniff-GPS)、[hypatia](https://github.com/snkas/hypatia)、[gps-measurement-tools](https://github.com/google/gps-measurement-tools)、[FE-GUT](https://github.com/zhaoqj23/FE-GUT)、[gnss-RX](https://github.com/HeryMwenegoha/gnss-RX)、[Pypredict](https://github.com/spel-uchile/Pypredict)、[novatel-gps-driver](https://github.com/swri-robotics/novatel_gps_driver)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[GNSS-Radar](https://github.com/taroz/GNSS-Radar)、[geodesy_modeling](https://github.com/kmaterna/geodesy_modeling)、[gnss-odometry](https://github.com/mgoar/gnss-odometry)、[Caster_Project](https://github.com/KOROyo123/Caster_Project)、[rviz_satellite](https://github.com/nobleo/rviz_satellite)、[gnatss](https://github.com/seafloor-geodesy/gnatss)、[gnssr_lowcost](https://github.com/purnelldj/gnssr_lowcost)、[satellite-position-calculation-mapping](https://github.com/egemengulpinar/satellite-position-calculation-mapping)、[SatellitePosition](https://github.com/LStudioLoren/SatellitePosition)、[GNSSTool](https://github.com/quectel-open-source/GNSSTool)、[pynex](https://github.com/swift-nav/pynex)、[pygnssutils](https://github.com/semuconsulting/pygnssutils)、[flipperzero-gps](https://github.com/ezod/flipperzero-gps)、[ROS-GPS](https://github.com/sigmaai/ROS-GPS)、[rtk-rs](https://github.com/rtk-rs)、[ge-gnss-visibility](https://github.com/taroz/ge-gnss-visibility)、[OpenRTK](https://github.com/AndreasArendt/OpenRTK)、[GNSS_RTK](https://github.com/SupakunZ/GNSS_RTK)、[LEOGPS](https://github.com/sammmlow/LEOGPS)、[GPSToolbox 投稿](https://geodesy.noaa.gov/gps-toolbox/exist.htm)、[barbeau-awesome-gnss 整理](https://github.com/barbeau/awesome-gnss)、[hdkarimi-awesome-gnss 整理](https://github.com/hdkarimi/awesome-gnss)、[mcraymer 整理](https://mcraymer.github.io/geodesy/index.html)、[Awesome-Geospatial 整理](https://github.com/sacridini/Awesome-Geospatial)、[GISResourcce 整理](https://gisresources.com/) |
| **[GNSS 信号处理](导航定位建图开源项目记录.md#GNSS-Signal)** | **[GNSS-SDR](https://github.com/gnss-sdr/gnss-sdr)**、[gnss-sdr-monitor](https://github.com/acebrianjuan/gnss-sdr-monitor)、**[SoftGNSS](https://github.com/kristianpaul/SoftGNSS)**、[SoftGNSS-python](https://github.com/perrysou/SoftGNSS-python)、**[PocketSDR](https://github.com/tomojitakasu/PocketSDR)**、[GNSS-SDRLIB](https://github.com/taroz/GNSS-SDRLIB)、[nut2nt](https://github.com/amungo/nut2nt)、[Beagle_SDR_GPS](https://github.com/jks-prv/Beagle_SDR_GPS)、[KiwiSDR](https://forum.kiwisdr.com/)、[FlyDog-SDR-GPS](https://github.com/flydog-sdr/FlyDog_SDR_GPS)、[FlyCat-SDR-GPS](https://github.com/flydog-sdr/FlyCat_SDR_GPS)、[Full_Stack_GPS_Receiver](https://github.com/hamsternz/Full_Stack_GPS_Receiver)、[BDS-3-B1C-B2a-SDR-receiver](https://github.com/lyf8118/BDS-3-B1C-B2a-SDR-receiver)、[FGI-GSRx](https://github.com/nlsfi/FGI-GSRx)、[gypsum](https://github.com/codyd51/gypsum)、[sydr](https://github.com/aproposorg/sydr)、[NavLab-DPE-SDR](https://github.com/Stanford-NavLab/NavLab-DPE-SDR)、[multi-channel-gnss](https://github.com/dasdboot/multi-channel-gnss)、[GPUAcceleratedTracking](https://github.com/coezmaden/GPUAcceleratedTracking)、[GNSS-GPS-SDR](https://github.com/JiaoXianjun/GNSS-GPS-SDR)、[SDR-GPS-SPOOF](https://github.com/B44D3R/SDR-GPS-SPOOF)、[gps](https://github.com/psas/gps)、[SnapperGPS](https://snappergps.info/)、[snapshot-gnss-algorithms](https://github.com/JonasBchrt/snapshot-gnss-algorithms)、[gnss-sdr-1pps](https://github.com/oscimp/gnss-sdr-1pps)、[SatDump](https://github.com/SatDump/SatDump)、[gps-sdr-simulink](https://github.com/dmiralles2009/gps-sdr-simulink)、[gps-sdr-sim](https://github.com/osqzss/gps-sdr-sim)、[beidou-sdr-sim](https://github.com/yangfan852219770/beidou-sdr-sim)、[galileo-sdr-sim](https://github.com/harshadms/galileo-sdr-sim)、[gps-qzss-sdr-sim](https://github.com/iGNSS/gps-qzss-sdr-sim)、[multi-sdr-gps-sim](https://github.com/Mictronics/multi-sdr-gps-sim)、[pluto-gps-sim](https://github.com/Mictronics/pluto-gps-sim)、[SignalSim](https://github.com/globsky/SignalSim)、[Microsat-gps-sim](https://github.com/niklasknoell/Microsat-gps-sim)、[GPS_GAL_SSS](https://github.com/domonforyou/GPS_GAL_SSS)、[greta-oto](https://github.com/globsky/greta-oto)、[BD3_FPGA](https://github.com/whc2uestc/BD3_FPGA)、[GNSS-matlab](https://github.com/danipascual/GNSS-matlab)、[oresat-gps-software](https://github.com/oresat/oresat-gps-software)/[hardware](https://github.com/oresat/oresat-gps-hardware)、[MAX2769FT2232H](https://github.com/WKyleGilbertson/MAX2769FT2232H)、[SDR-GB-SAR](https://github.com/jmfriedt/SDR-GB-SAR)、[gps-rf-frontend-sim](https://github.com/iliasam/gps_rf_frontend_sim)、[GNSS-VHDL](https://github.com/danipascual/GNSS-VHDL)、[GNSS-Metadata-Standard](https://github.com/IonMetadataWorkingGroup/GNSS-Metadata-Standard)、[gnss-baseband](https://github.com/j-core/gnss-baseband)、[GPSMAXIM2769b-](https://github.com/vaidhyamookiah/GPSMAXIM2769b-)、[Analog-GPS-data-receiver](https://github.com/leaningktower/Analog-GPS-data-receiver)、[GNSS_Firehose](https://github.com/pmonta/GNSS_Firehose)、[GNSS-DSP-tools](https://github.com/pmonta/GNSS-DSP-tools)、[hard_sydr](https://github.com/aproposorg/hard_sydr)、[B1C-Signals-Simulation](https://github.com/pandaclover/B1C_Signals_Simulation)、[CU-SDR-Collection](https://github.com/gnsscusdr/CU-SDR-Collection)、[ESP32-SDR-GPS](https://github.com/iliasam/ESP32_SDR_GPS)、[STM32F4-SDR-GPS](https://github.com/iliasam/STM32F4_SDR_GPS)、[Fast-GNSS-ReceiverMATLAB](https://github.com/JohnBagshaw/Fast_GNSS_ReceiverMATLAB)、[gnss-sdr-rs](https://github.com/kewei/gnss-sdr-rs)、[sdr-beamforming](https://github.com/ADolbyB/sdr-beamforming)、[gr-gnMAX2769](https://github.com/wkazubski/gr-gnMAX2769)、[gps-sdr](https://github.com/gps-sdr/gps-sdr)、[GPSL1-DPEmodule](https://github.com/Sergio-Vicenzo/GPSL1-DPEmodule)、[esp2822_NMEA_sim](https://github.com/michalpelka/esp2822_NMEA_sim)、[BDS_SDR](https://github.com/nkyang/BDS_SDR) |
| **[INS、组合导航](导航定位建图开源项目记录.md#INS)** | [INS_Course_Matlab](https://github.com/LiZhengXiao99/INS_Course_Matlab)、**[PSINS](http://www.psins.org.cn/)**、[Android-PSINSToolbox](https://gitee.com/tmrnic/android-psinstoolbox)、[PSINS-ROS](https://github.com/BohemianRhapsodyz/PSINS-ROS)、[PSINS-Develop-Group](https://github.com/Cattle521/PSINS-Develop-Group)、[PSINS_FIMU](https://github.com/georgenwpu/PSINS_FIMU)、**[KF-GINS](https://github.com/i2Nav-WHU/KF-GINS)**、[KF_GINS_GUI](https://github.com/Wang-Jie-Lucid-Sheep/KF_GINS_GUI)、[py_IMU](https://github.com/Dennissy23/py_IMU)、**[OB-GINS](https://github.com/i2Nav-WHU/OB_GINS)**、**[TGINS](https://github.com/heiwa0519/TGINS)**、[PPPLIB](https://geodesy.noaa.gov/gps-toolbox/PPPLib.htm)、[Compass](https://gitee.com/hw_cc/compass)、[GINAV](https://github.com/kaichen686/GINav)/[v2.0](https://github.com/kaichen686/GINav_v2.0-test)、[IGNAV](https://github.com/Erensu/ignav)、[MATLAB-Groves](https://github.com/zbai/MATLAB-Groves)、[GIOW-release](https://github.com/i2Nav-WHU/GIOW-release)、[imu_x_fusion](https://github.com/cggos/imu_x_fusion)、[OpenIMU](https://github.com/introlab/OpenIMU)、[ronin](https://github.com/Sachini/ronin)、[RINS-W](https://github.com/mbrossar/RINS-W)、[invensense-imu](https://github.com/bolderflight/invensense-imu)、[eagleye](https://github.com/MapIV/eagleye)、[ai-imu-dr](https://github.com/mbrossar/ai-imu-dr)、[NaveCodePro](https://github.com/zelanzou/NaveCodePro)、[InertialNav](https://github.com/priseborough/InertialNav)、[allan-variance-ros](https://github.com/ori-drs/allan_variance_ros)、[eskf_localization](https://github.com/Arcanain/eskf_localization)、[imu_gnss_eskf](https://github.com/zouyajing/imu_gnss_eskf)、[nav_matlab](https://github.com/yandld/nav_matlab)、[imu_zupt](https://github.com/Fixit-Davide/imu_zupt)、[IEZ](https://github.com/pajaraca/IEZ)、[ZUPT-aided-INS](https://github.com/hcarlsso/ZUPT-aided-INS)、[gnss-ins-zupt](https://github.com/wvu-navLab/gnss-ins-zupt)、[corenav-GP](https://github.com/wvu-navLab/corenav-GP)、[kalibr](https://github.com/ethz-asl/kalibr)、[kalibr_allan](https://github.com/rpng/kalibr_allan)、[allan_variance_ros](https://github.com/ori-drs/allan_variance_ros)、[allan_variance](https://github.com/GAVLab/allan_variance)、[imu_allan](https://github.com/alalagong/imu_allan)、[allan_ros2](https://github.com/CruxDevStuff/allan_ros2)、[AdevAnalysis](https://github.com/itsuhane/AdevAnalysis)、[imu-data-simulation](https://github.com/robosu12/imu_data_simulation)、[GPS_IMU_Kalman_Filter](https://github.com/karanchawla/GPS_IMU_Kalman_Filter)、[TightlyCoupledINSGNSS](https://github.com/benzenemo/TightlyCoupledINSGNSS)、[stm32f4_mpu9250](https://github.com/suhetao/stm32f4_mpu9250)、[mpu6050](https://github.com/libdriver/mpu6050)、[mpu9250](https://github.com/libdriver/mpu9250)、[FastIMU](https://github.com/LiquidCGS/FastIMU)、[Wheel-INS ](https://github.com/i2Nav-WHU/Wheel-INS)、[GNSS-INS](https://github.com/hitleeleo/GNSS-INS)、[pyshoe](https://github.com/utiasSTARS/pyshoe)、[imu_tools](https://github.com/CCNYRoboticsLab/imu_tools)、[IMUCalibration-Gesture](https://github.com/shenshikexmu/IMUCalibration-Gesture)、[ImuCalibration-Poistion](https://github.com/shenshikexmu/ImuCalibration-Poistion)、[imu_utils](https://github.com/gaowenliang/imu_utils)、[GyroAllan](https://github.com/XinLiGH/GyroAllan)、[gnss-ins-sim](https://github.com/Aceinna/gnss-ins-sim)、[MEMS-IMU-Denoising](https://github.com/ansfl/MEMS-IMU-Denoising)、[agrobot](https://github.com/nesl/agrobot)、[IBG_EKF_TC](https://github.com/Dennissy23/IBG_EKF_TC)、[ZCJ-GNSSINS-DeepIntegration](https://github.com/kongtian-SiBu/ZCJ_GNSSINS_DeepIntegration)、[Smartphone-IMU-GPS](https://github.com/alexschultze/Smartphone_IMU_GPS)、[INSTINCT](https://github.com/UniStuttgart-INS/INSTINCT)、[Gait-Tracking](https://github.com/xioTechnologies/Gait-Tracking)、[Machine-Learning-GNSS-IMU-Integration](https://github.com/Akpozi/Machine_Learning_GNSS_IMU_Integration)、[ImuCalibration-Poistion](https://github.com/shenshikexmu/ImuCalibration-Poistion)、[ ADIS16470-Arduino-Teensy](https://github.com/juchong/ADIS16470_Arduino_Teensy)、[Seeed_ADIS16470](https://github.com/Seeed-Studio/Seeed_ADIS16470)、[iXR_GNSS-IMU_TightlyCouplingProgram](https://github.com/kakusang2020/iXR_GNSS-IMU_TightlyCouplingProgram)、[KalmanFilter_Vehicle_GNSS_INS](https://github.com/alirezaahmadi/KalmanFilter-Vehicle-GNSS-INS)、[GPS_Milemeter_IMU_EKFLocation](https://github.com/gilbertz/GPS_Milemeter_IMU_EKFLocation)、[IMUNet](https://github.com/BehnamZeinali/IMUNet)、[SmartIMU](https://github.com/KitSprout/SmartIMU)、[IMUSensorModels](https://github.com/hanley6/IMUSensorModels)、[imu_gps_localization](https://github.com/ydsf16/imu_gps_localization)、[dcm-imu](https://github.com/hhyyti/dcm-imu)、[denoise_imu_gyro](https://github.com/mbrossar/denoise-imu-gyro)、[vectornav](https://github.com/dawonn/vectornav)、[OpenIMUFilter](https://github.com/hustcalm/OpenIMUFilter)、[9DOF_Razor_IMU](https://github.com/sparkfun/9DOF_Razor_IMU)、[IMU_Attitude_Estimator](https://github.com/gaochq/IMU_Attitude_Estimator)、[SparkFun_LSM9DS1_Arduino_Library](https://github.com/sparkfun/SparkFun_LSM9DS1_Arduino_Library)、[imu_pipeline](https://github.com/ros-perception/imu_pipeline)、[ESEKF_IMU](https://github.com/aipiano/ESEKF_IMU)、[IMA-estimation](https://github.com/QIJINCHEN/IMA-estimation)、[fusion](https://github.com/Guo-ziwei/fusion)、[Indirect_EKF_IMU_GPS](https://github.com/hgpvision/Indirect_EKF_IMU_GPS)、[gps_imu_fusion](https://github.com/Shelfcol/gps_imu_fusion)、[imu_ekf](https://github.com/mrsp/imu_ekf)、[x-IMU-GUI](https://github.com/xioTechnologies/x-IMU-GUI)、[ekf-imu-depth](https://github.com/SenZHANG-GitHub/ekf-imu-depth)、[imu_tk_matlab](https://github.com/JzHuai0108/imu_tk_matlab)、[imu_tk](https://github.com/Kyle-ak/imu_tk)、[IMU_Preintegration](https://github.com/ujasmandavia/IMU_Preintegration)、[RTIMULib2](https://github.com/HongshiTan/RTIMULib2)、[imu_to_odom](https://github.com/nadiawangberg/imu_to_odom)、[imu-human-pose-pytorch](https://github.com/CHUNYUWANG/imu-human-pose-pytorch)、[IMU-Array](https://github.com/i2Nav-WHU/IMU-Array)、[IMUPoser](https://github.com/FIGLAB/IMUPoser)、[IMUDB](https://github.com/KleinYuan/IMUDB)、[har_with_imu_transformer](https://github.com/yolish/har-with-imu-transformer)、[EyeMU](https://github.com/FIGLAB/EyeMU)、[Attitude-Estimation](https://github.com/pms67/Attitude-Estimation)、[Activity_Detection_using_IMU_sensor](https://github.com/mohan-mj/Activity-Detection-using-IMU-sensor)、[lwoi](https://github.com/CAOR-MINES-ParisTech/lwoi)、[InvariantEKF_GNSS_IMU](https://github.com/mfkiwl/InvariantEKF_GNSS_IMU)、[imu_veh_calib](https://github.com/smallsunsun1/imu_veh_calib)、[ImuMeanFilter](https://github.com/XinLiGH/ImuMeanFilter)、[kalman_filter_with_kitti](https://github.com/motokimura/kalman_filter_with_kitti)、[ImuGpsGuiding](https://github.com/JackJu-HIT/ImuGpsGuiding)、[OpenSimRT](https://github.com/mitkof6/OpenSimRT)、[RTD_phone](https://github.com/milkytipo/RTD_phone)、[ADIS16470_Demo](https://github.com/wmdscjhdpy/ADIS16470_Demo)、[odom_predictor](https://github.com/ethz-asl/odom_predictor)、[robot_pose_ekf](https://github.com/udacity/robot_pose_ekf)、[UKF](https://github.com/krishnasandeep09/UKF)、[gnss-sensor-fusion](https://github.com/betaBison/gnss-sensor-fusion)、[amsi](https://github.com/weisongwen/amsi)、[EgoLocate](https://github.com/Xinyu-Yi/EgoLocate)、[learned_inertial_model_odometry](https://github.com/uzh-rpg/learned_inertial_model_odometry)、[MadgwickAHRS](https://github.com/arduino-libraries/MadgwickAHRS)、[integrated-navigation](https://github.com/XDDz123/integrated-navigation)、[KGP-IAEKF-IGGIII](https://github.com/chi-qhsun/KGP-IAEKF-IGGIII)、[navfusion](https://github.com/nvpadron/navfusion)、[Madgwick_Filter](https://github.com/bjohnsonfl/Madgwick_Filter)、[UrbanRTK-INS-OutlierOpt](https://github.com/Azurehappen/UrbanRTK-INS-OutlierOpt)、[SCH63T_MINI_EVK](https://github.com/tomojitakasu/SCH63T_MINI_EVK)、[GPS_IMU_Kalman_Filter](https://github.com/karanchawla/GPS_IMU_Kalman_Filter)、[Location](https://github.com/yyccR/Location)、[waypoint_nav](https://github.com/nickcharron/waypoint_nav)、[GIOW-release](https://github.com/i2Nav-WHU/GIOW-release)、[pyins](https://github.com/nmayorov/pyins)、[GINS-Navi](https://github.com/lewis5499/GINS-Navi)、[GNSS_INS_Integrations_Comparisons](https://github.com/ZhengdaoLI0602/GNSS_INS_Integrations_Comparisons)、[KF-GINS-ECEF](https://github.com/akui1321/KF-GINS-ECEF)、[TDL-GNSS](https://github.com/ebhrz/TDL-GNSS) |
| **[视觉 SLAM](导航定位建图开源项目记录.md#Vision)** | **[Vins-Mono](https://github.com/HKUST-Aerial-Robotics/VINS-Mono)/[Fusion](https://github.com/HKUST-Aerial-Robotics/VINS-Fusion)**、**[ORB-SLAM3](https://github.com/UZ-SLAMLab/ORB_SLAM3)**/[2](https://github.com/raulmur/ORB_SLAM2)/[1](https://github.com/raulmur/ORB_SLAM)、[OpenVINS](https://github.com/rpng/open_vins)、[Openvslam](https://github.com/xdspacelab/openvslam)、[svo](https://github.com/uzh-rpg/rpg_svo)、[svo_pro](https://github.com/uzh-rpg/rpg_svo_pro_open)、[msckf_vio](https://github.com/KumarRobotics/msckf_vio)、[okvis](https://github.com/ethz-asl/okvis)、[DM-VIO](https://github.com/lukasvst/dm-vio)、[DSO](https://github.com/JakobEngel/dso)、[DSOL](https://github.com/versatran01/dsol)、[wildnav](https://github.com/TIERS/wildnav)、[NeRF](https://github.com/bmild/nerf)、[H3](https://github.com/SYSU-STAR/H3-Mapping)/[H2-Mapping](https://github.com/SYSU-STAR/H2-Mapping)、[gaussian-splatting](https://github.com/graphdeco-inria/gaussian-splatting)、[2d-gaussian-splatting](https://github.com/hbb1/2d-gaussian-splatting)、[Elasticfusion](https://github.com/mp3guy/ElasticFusion)、[OpenMVG](https://github.com/openMVG/openMVG)、[Meshroom](https://github.com/alicevision/Meshroom)、[Kintinuous](https://github.com/mp3guy/Kintinuous)、[Mvision](https://github.com/Ewenwan/MVision)、[rgbdslam_v2](https://github.com/felixendres/rgbdslam_v2)、[camera_calibration](https://github.com/puzzlepaint/camera_calibration)、[crisp](https://github.com/hovren/crisp)、[VideoIMUCapture-Android](https://github.com/DavidGillsjo/VideoIMUCapture-Android)、[OpenImuCameraCalibrator](https://github.com/urbste/OpenImuCameraCalibrator)、[Structure-SLAM-PointLine](https://github.com/yanyan-li/Structure-SLAM-PointLine)、[SLAM_interface](https://github.com/Tompson11/SLAM_interface)、[Sync_Pola_IMU_ROS](https://github.com/BlanchonMarc/Sync_Pola_IMU_ROS)、[ViDAR](https://github.com/OpenDriveLab/ViDAR)、[BEVFormer](https://github.com/fundamentalvision/BEVFormer)、[aruco_ekf_slam](https://github.com/ydsf16/aruco_ekf_slam)、[ AVP-SLAM-SIM](https://github.com/TurtleZhong/AVP-SLAM-SIM)、[MSCKF_VIO_MONO](https://github.com/UMiNS/MSCKF_VIO_MONO)、[VIW-Fusion](https://github.com/TouchDeeper/VIW-Fusion)、[awesome-visual-slam 整理](https://github.com/tzutalin/awesome-visual-slam)、[Recent_SLAM_Research 整理](https://github.com/YiChenCityU/Recent_SLAM_Research)、[Awesome CV Works 整理](https://vincentqin.tech/posts/awesome-works/)、[Lee-SLAM-source 整理](https://github.com/AlbertSlam/Lee-SLAM-source)、[Awesome-SLAM 整理](https://github.com/SilenceOverflow/Awesome-SLAM)、[awesome-slam 整理](https://github.com/kanster/awesome-slam)、[Awesome_Dynamic_SLAM 整理](https://github.com/zhuhu00/Awesome_Dynamic_SLAM)、[awesome-NeRF 整理](https://github.com/awesome-NeRF/awesome-NeRF)、[visual-slam-roadmap 整理](https://github.com/changh95/visual-slam-roadmap)、[Visual_SLAM_Related_Research 整理](https://github.com/wuxiaolang/Visual_SLAM_Related_Research)、[vins-application 整理](https://github.com/engcang/vins-application)、[Recent-Stars-2024 整理](https://github.com/Vincentqyw/Recent-Stars-2024)、[Visual Navigation 整理](https://paperswithcode.com/task/visual-navigation)、[Awesome-Optical-Flow 整理](https://github.com/hzwer/Awesome-Optical-Flow)、[awesome-Implicit-NeRF-SLAM 整理](https://github.com/DoongLi/awesome-Implicit-NeRF-SLAM)、[awesome-computer-vision 整理](https://github.com/jbhuang0604/awesome-computer-vision)、[awesome-semantic-segmentation 整理](https://github.com/mrgloom/awesome-semantic-segmentation)、[awesome_3d_slam_resources 整理](https://github.com/qxiaofan/awesome_3d_slam_resources)、[awesome-road-environment-segmentation 整理](https://github.com/DaveLogs/awesome-road-environment-segmentation)、[Awesome-BEV-Perception-Multi-Cameras 整理](https://github.com/chaytonmin/Awesome-BEV-Perception-Multi-Cameras) |
diff --git "a/\345\205\254\344\274\227\345\217\267\346\235\202\346\226\207/01-\346\216\250\350\215\220\344\270\211\346\254\276\345\233\275\345\206\205\347\232\204\345\274\200\346\272\220GNSS\346\225\260\346\215\256\345\222\214\344\272\247\345\223\201\344\270\213\350\275\275\350\275\257\344\273\266\357\274\232GAMP-GOOD\343\200\201FAST\343\200\201GDDS.md" "b/\345\205\254\344\274\227\345\217\267\346\235\202\346\226\207/01-\346\216\250\350\215\220\344\270\211\346\254\276\345\233\275\345\206\205\347\232\204\345\274\200\346\272\220GNSS\346\225\260\346\215\256\345\222\214\344\272\247\345\223\201\344\270\213\350\275\275\350\275\257\344\273\266\357\274\232GAMP-GOOD\343\200\201FAST\343\200\201GDDS.md"
new file mode 100644
index 0000000..97d7ca9
--- /dev/null
+++ "b/\345\205\254\344\274\227\345\217\267\346\235\202\346\226\207/01-\346\216\250\350\215\220\344\270\211\346\254\276\345\233\275\345\206\205\347\232\204\345\274\200\346\272\220GNSS\346\225\260\346\215\256\345\222\214\344\272\247\345\223\201\344\270\213\350\275\275\350\275\257\344\273\266\357\274\232GAMP-GOOD\343\200\201FAST\343\200\201GDDS.md"
@@ -0,0 +1,269 @@
+
+
+# 推荐国内的三款开源 GNSS 数据和产品下载软件:GAMP-GOOD、FAST、GDDS
+
+数据下载是困扰 GNSS 初学者入门的一大麻烦事,在此推荐国内的三款开源软件(GAMP-GOOD、FAST、GDDS),希望能帮助大家解决 GNSS 数据下载的烦恼。
+
+三款软件都非常优秀,支持界面操作,支持下载 PPP 的所需的各种产品,支持下载 IGS、MGEX 的全球测站数据和 CUT、HK、NGS 等区域测站的数据,还可以在下载数据之后帮咱解压。
+
+三款软件各有千秋,GAMP-GOOD 精致,FAST 支持下载的数据最多,GDDS 功能最强大,可以都尝试尝试,然后选一个作为数据下载的主力软件,另外两个作为补充,发挥出这些工具最大的效用。
+
+GAMP-GOOD 是三款软件中开源最早的,一直在不断地优化与迭代,周锋老师做过三次直播分享,都有录播(一次在 Geososo 公众号,两次在 B 站)。之前版本只有命令行程序,用户需要通过修改配置文件来选择要下载的数据,较为繁琐;前段时间,周锋老师找我给它做了套界面,最新的 GAMP-GOOD4.0 版本由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt 界面可执行程序 Good_Gui 三部分组成。
+
+界面版程序的易用性相比命令行有了极大的提升,上手难度更低,选择数据更容易,还有更多可选择的文件结构;支持预览下载完成的数据,检查数据是否完整、观测数据有哪些频点;支持根据观测文件,下载对应的导航电文和 PPP 文件;日志输出中的文件路径、链接,可以直接选中跳转。
+
+但是受限于时间和能力,还有一些小 BUG 没有解决,暂时不支持中文路径,不支持下载快速和超快速的精密星历、精密钟差、电离层产品,文件下载失败时日志输出不完整。
+
+FAST 支持的数据种类最多,程序简单,易于拓展,武大近期开源的 GREAT-PVT 里面数据下载就是基于 FAST 实现的。它的命令行程序引导着用户一步步选择要下载的数据,上手容易;最新的程序支持数据质量分析和 SPP,支持批处理,而且绘图美观。
+
+GDDS 开源较晚,目前知名度不如前两款,但它的功能是极其强大的,下载完成试用了之后,我感到惊为天人,实现了很多我在给 GAMP-GOOD 做界面的时候,想做但是因为编程技术和时间的限制而没有实现的功能。最令我感到惊艳的功能是,用户还可以自定义链接格式,拼接出 ftp、http、https 链接,来下载给定的产品类型外的数据。
+
+
+
+
+
+
+
+
+
+
+
+| | GAMP-GOOD | FAST | GDDS |
+| :-------------: | :----------------------------------------------------------: | :----------------------------------------------------------: | :----------------------------------------------------------: |
+| **作者** | 周锋(山科)、李郑骁(安理工) | 常春涛(武大 GNSS 中心) | 卢立果(东华理工) |
+| **最新版本** | 4.0(Github 只更新到 3.1) | 3.0(Github 只更新到 2.11) | 1.2 |
+| **Github** | https://github.com/zhouforme0318/GAMPII-GOOD | https://github.com/ChangChuntao/FAST | https://github.com/LECUT/GDDS |
+| **GPS ToolBox** | 在投 | 准备投稿 | https://geodesy.noaa.gov/gps-toolbox/gdds.shtml |
+| **编程语言** | C++、Qt5 | Python、PyQt5 | Python、PyQt5 |
+| **软件形式** | 命令行 + 界面 | 命令行 + 界面 | 仅界面程序 |
+| **数据中心** | CDDIS、IGN、WHU | WHU | WHU、IGN、ESA、KASI、SIO、CDDIS |
+| **数据类型** | OBS、NAV、ORB、CLK、OBX、DSB、OSB、SNX、EOP、ATX、ROTI、IONO、TROP | OBS、NAV、ORB、CLK、OBX、DSB、OSB、SNX、EOP、ATX、IONO、VMF、TROP、Meteorology、CNES_AR、SLR、LEO、Time_series、Velocity_Fields、Panda、GAMIT(支持数据种类最多) | OBS、NAV、ORB、CLK、OBX、DSB、OSB、SNX、EOP、ATX、IONO、TROP、Time_series(除此以外,还可以添加自定义链接格式) |
+| **区域CORS** | HK、CUT、NGS、PBO、CHI、GA(GA 数据通过 Linux 脚本下载) | NGS、HK、GA(无法下载近三年 GA 数据) | NGS、EPN、SPAIN、JPN、HK、CUT、ARPREF |
+| **测站选择** | ①输入测站名;②上传测站列表文件 | ①输入测站名;②上传测站列表文件;③地图筛选指定卫星系统、天线名、经纬度范围内的数据; | 在给定的测站列表里选择 |
+| **测站地图** | 只能点击按钮跳转测站地图链接 | 可以在地图上绘制已选择的测站 | 调用百度地图 API 显示已选择的测站 |
+| **日期选择** | ①起止日期、②起始日期+天数 | 起止日期 | 起止日期 |
+| **下载路径** | 不支持中文路径(考完研我来改进)、目标路径不存在可以自动创建 | 支持中文路径、目标路径必须存在 | 支持中文路径、目标路径不存在可以自动创建 |
+| **信息输出** | 日志窗口 + 日志文件 | 日志窗口 | 日志文件 + 进度条 |
+| **使用教程** | README + Manual + PPT + 三场直播/录播讲解 + 控件提示 + 热心网友的博客 | README + 热心网友的博客 | Manual + 论文 |
+| **其它亮点** | ①可以同时下载多种数据,支持多层次的文件结构;②支持下载前后天的精密星历钟差;③日志输出层次清晰,不同级别用不同的颜色;命令行程序支持输出 wget 信息;④支持根据观测文件,下载对应的导航电文和 PPP 文件;⑤支持在程序中预览下载完成的数据,可以看看数据全不全,观测数据有哪些频点;⑥日志输出中的文件路径、链接,可以直接跳转; | ①支持并行下载数据,但是每次只能选择一种类型的数据,并行下载的功能大大受限;②最新的程序支持数据质量分析和 SPP,支持批处理,而且绘图美观;③支持的数据种类最多,而且各种数据类型通过下拉框来展示,拓展较为容易;④命令行程上手容易,引导着用户一步步选择要下载的数据; | ①支持并行下载数据,比 FAST 更好的一点在于 GDDS 可以同时选择星历和观测、或者同时选择各种产品下载;②同种产品可选择的细分数据类型全面;③除了给定的产品类型外,用户还可以自定义链接格式,拼接出 ftp、http、https 链接;④源码注释完善,每个文件、每个代码段前面都有简要注释,拼接产品链接的那行代码前,还会在注释里给出一个链接的示例; |
+| **其它缺陷** | ①部分产品下载失败的时候,无法正常输出日志;②暂时无法下载快速、超快速的 ORB、CLK、IONO;③同种产品可选择的细分数据类型少,(比如某些产品 FIN 和 RAP 只支持其一,比如默认下载周解 SNX,不存在时才能下载天解);④界面程序的部分功能不直观,得看介绍才能明白要怎么用;⑤C++ 程序修改和拓展起来比 Python 更困难; | ①日期只能年月日分开输,不能通过日历选择;想输入年积日和 GPS 周,必须先通过左侧工具转为年月日; | ①下载完成之后不能自动解压;②点击下载界面就卡住无响应了,可能是因为没有开新的线程来执行下载操作,导致下载的线程阻塞了界面响应;③异常处理做的不充分,程序易崩溃; |
+
+
+
+
+
+## GAMP-GOOD
+
+GOOD 是三款软件中开源最早的,历经 15 个版本的迭代,一直在不断地优化迭代,最新的 GAMP-GOOD4.0 版本由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt 界面可执行程序 Good_Gui 三部分组成,实现了常用 GNSS 观测值、广播星历、精密卫星轨道和钟差、地球定向参数、卫星姿态ORBEX、DCB/DSB/OSB、SINEX周解、电离层和对流层延迟产品、天线相位中心等产品下载。
+
+
+
+| 数据类型 | 用处 |
+| :--------------------------------------: | :---------------------------------------: |
+| IGS观测数据 (RINEX 2.xx, 短文件名) | 多用于GPS定轨、估钟、PPP算法验证等 |
+| MGEX观测数据 (RINEX 3.xx, 长文件名) | 多用于多系统GNSS定轨、估钟、PPP算法验证等 |
+| 科廷科技大学短基线 CORS 观测值 | 多用于短基线RTK算法验证 |
+| 澳大利亚地球科学局 (GA) 观测值 | 多用于BDS-2/3 UPD估计、PPP算法验证等 |
+| 香港CORS观测值(RINEX 3.xx, 长文件名) | 多用于海潮、GNSS水汽、电离层延迟建模等 |
+| 广播星历 (yyg/yyn/yyp 等) | 多用于SPP、RTK解算中的卫星坐标与钟差计算 |
+| IGS 与 MGEX 各分析中心精密轨道和钟差产品 | 多用于PPP解算中的卫星轨道和钟差计算 |
+| 地球自转参数 | 多用于计算极潮改正 |
+| IGS SINEX周解/天解 | 多用作定位算法验证的参考坐标 |
+| CODE或MGEX差分码偏差 | 多用于改正伪距硬件延迟 |
+| 全球电离层图 (GIM) | 全球电离层延迟产品 |
+| 全球电离层闪烁 (ROTI) | 多用于电离层不规则体和闪烁研究 |
+| CNES离线实时轨道/钟差/相位小数偏差产品 | 用于实时PPP算法验证、实时PPP模糊度固定等 |
+| IGS天线相位中心改正 (ANTEX) | 用于卫星和接收机天线相位中心改正 |
+
+
+
+
+
+
+
+## 附录:常用 GNSS 数据下载链接
+
+
+
+### 1、数据格式官方文档
+
+```
+- [Rinex2.11] : https://files.igs.org/pub/data/format/rinex211.txt
+- [Rinex3.05] : https://files.igs.org/pub/data/format/rinex305.pdf
+- [Rinex4.01] : https://files.igs.org/pub/data/format/rinex_4.01.pdf
+- [DCB/BSX] : https://files.igs.org/pub/data/format/sinex_bias_100.pdf
+- [SP3] : https://files.igs.org/pub/data/format/sp3d.pdf
+- [CLK] : https://files.igs.org/pub/data/format/rinex_clock304.txt
+- [ERP] : https://files.igs.org/pub/data/format/erp.txt
+- [SINEX] : https://www.iers.org/SharedDocs/Publikationen/EN/IERS/Documents/ac/sinex/sinex_v202_pdf
+- [Trop] : https://files.igs.org/pub/data/format/sinex_tro_v2.00.pdf
+- [GIM/Roti] : https://files.igs.org/pub/data/format/ionex1.pdf
+- [ANTEX] : https://files.igs.org/pub/data/format/antex14.txt
+```
+
+### 2、 IGS 数据中心
+
+```
+- [WHU (China)] : ftp://igs.gnsswhu.cn
+- [IGN (France)] : ftp://igs.ign.fr
+- [ESA (Europe)] : ftp://gssc.esa.int
+- [KASI (Korea)] : ftp://nfs.kasi.re.kr
+- [SIO (USA)] : ftp://lox.ucsd.edu
+- [CDDIS (USA)] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss
+```
+
+### 3、 区域 CORS
+
+```
+- [USA CORS] : https://geodesy.noaa.gov
+- [Europe EPN] : ftp://ftp.epncb.oma.be
+- [Spain CORS] : http://ftp.itacyl.es
+- [Japan JPN] : ftp://mgmds01.tksc.jaxa.jp
+- [Hong Kong CORS] : ftp://ftp.geodetic.gov.hk
+- [Curtin University] : http://gnss.curtin.edu.au
+- [Australia APREF] : ftp://ftp.data.gnss.ga.gov.au
+- [pbo] : https://data.unavco.org/archive/gnss/highrate
+- [chi] : https://gps.csn.uchile.cl/data/
+```
+
+### 4、 CDDIS 下载链接
+
+```
+- [IGS daily observation (30s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+- [IGS hourly observation (30s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/hourly
+- [IGS high-rate observation (1s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/highrate
+- [MGEX daily observation (30s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+- [MGEX hourly observation (30s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/hourly
+- [MGEX high-rate observation (1s) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/highrate
+- [broadcast ephemeris files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+- [IGS SP3 files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+- [IGS CLK files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+- [IGS EOP files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+- [IGS weekly SINEX files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+- [MGEX SP3 files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+- [MGEX CLK files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+- [MGEX ORBEX files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+- [MGEX DSB files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/bias
+- [MGEX OSB files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+- [global ionosphere map (GIM) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/ionex
+- [Rate of TEC index (ROTI) files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/ionex
+- [IGS final tropospheric product files] : ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/troposphere/zpd
+```
+
+### 5、 IGN 下载链接
+
+```
+- [IGS daily observation (30s) files] : ftp://igs.ign.fr/pub/igs/data
+- [IGS hourly observation (30s) files] : ftp://igs.ign.fr/pub/igs/data/hourly
+- [IGS high-rate observation (1s) files] : ftp://igs.ign.fr/pub/igs/data/highrate
+- [MGEX daily observation (30s) files] : ftp://igs.ign.fr/pub/igs/data
+- [MGEX hourly observation (30s) files] : ftp://igs.ign.fr/pub/igs/data/hourly
+- [MGEX high-rate observation (1s) files] : ftp://igs.ign.fr/pub/igs/data/highrate
+- [broadcast ephemeris files] : ftp://igs.ign.fr/pub/igs/data
+- [IGS SP3 files] : ftp://igs.ign.fr/pub/igs/products
+- [IGS CLK files] : ftp://igs.ign.fr/pub/igs/products
+- [IGS EOP files] : ftp://igs.ign.fr/pub/igs/products
+- [IGS weekly SINEX files] : ftp://igs.ign.fr/pub/igs/products
+- [MGEX SP3 files] : ftp://igs.ign.fr/pub/igs/products/mgex
+- [MGEX CLK files] : ftp://igs.ign.fr/pub/igs/products/mgex
+- [MGEX ORBEX files] : ftp://igs.ign.fr/pub/igs/products/mgex
+- [MGEX DSB files] : ftp://igs.ign.fr/pub/igs/products/mgex/dcb
+- [MGEX OSB files] : ftp://igs.ign.fr/pub/igs/products/mgex
+- [global ionosphere map (GIM) files] : ftp://igs.ign.fr/pub/igs/products/ionosphere
+- [Rate of TEC index (ROTI) files] : ftp://igs.ign.fr/pub/igs/products/ionosphere
+- [IGS final tropospheric product files] : ftp://igs.ign.fr/pub/igs/products/troposphere
+```
+
+### 6、 WHU 下载链接
+
+```
+- [IGS daily observation (30s) files] : ftp://igs.gnsswhu.cn/pub/gps/data/daily
+- [IGS hourly observation (30s) files] : ftp://igs.gnsswhu.cn/pub/gps/data/hourly
+- [IGS high-rate observation (1s) files] : ftp://igs.gnsswhu.cn/pub/highrate
+- [MGEX daily observation (30s) files] : ftp://igs.gnsswhu.cn/pub/gps/data/daily
+- [MGEX hourly observation (30s) files] : ftp://igs.gnsswhu.cn/pub/gps/data/hourly
+- [MGEX high-rate observation (1s) files] : ftp://igs.gnsswhu.cn/pub/highrate
+- [broadcast ephemeris files] : ftp://igs.gnsswhu.cn/pub/gps/data/daily
+- [IGS SP3 files] : ftp://igs.gnsswhu.cn/pub/gps/products
+- [IGS CLK files] : ftp://igs.gnsswhu.cn/pub/gps/products
+- [IGS EOP files] : ftp://igs.gnsswhu.cn/pub/gps/products
+- [IGS weekly SINEX files] : ftp://igs.gnsswhu.cn/pub/gps/products
+- [MGEX SP3 files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- [MGEX CLK files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- [MGEX ORBEX files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- [MGEX DSB files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex/dcb
+- [MGEX OSB files] : ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- [global ionosphere map (GIM) files] : ftp://igs.gnsswhu.cn/pub/gps/products/ionex
+- [Rate of TEC index (ROTI) files] : ftp://igs.gnsswhu.cn/pub/gps/products/ionex
+- [IGS final tropospheric product files] : ftp://igs.gnsswhu.cn/pub/gps/products/troposphere/new
+```
+
+### 7、 各种产品下载链接
+
+```
+- 【Obs】
+ - 【igs/mgex/igm】
+ -
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+ - ftp://igs.ign.fr/pub/igs/data
+ - ftp://igs.gnsswhu.cn/pub/gps/data/daily
+ -
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/hourly
+ - ftp://igs.ign.fr/pub/igs/data/hourly
+ - ftp://igs.gnsswhu.cn/pub/gps/data/hourly
+ -
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/highrate
+ - ftp://igs.ign.fr/pub/igs/data/highrate
+ - ftp://igs.gnsswhu.cn/pub/highrate
+ - 【cut】: http://saegnss2.curtin.edu/ldc/rinex3/daily
+ - 【hk】 <30s / 5s/ 1s>: https://rinex.geodetic.gov.hk
+ - 【ngs】: https://noaa-cors-pds.s3.amazonaws.com/rinex
+ - 【epn】: ftp://ftp.epncb.oma.be/pub/obs
+ - 【pbo】: https://data.unavco.org/archive/gnss/highrate
+ - 【chi】: https://gps.csn.uchile.cl/data/
+- 【Nav】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/data/daily
+ - ftp://igs.ign.fr/pub/igs/data
+ - ftp://igs.gnsswhu.cn/pub/gps/data/daily
+ - ftp://ftp.pecny.cz/LDC/orbits_brd/gop3
+ - https://igs.bkg.bund.de/root_ftp/IGS/BRDC
+- 【Orb/Clk】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+ - ftp://igs.ign.fr/pub/igs/products
+ - ftp://igs.gnsswhu.cn/pub/gps/products
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+ - ftp://igs.ign.fr/pub/igs/products/mgex
+ - ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- 【Obx】
+- 【Dsb / Osb】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+ - ftp://igs.ign.fr/pub/igs/products
+ - ftp://igs.gnsswhu.cn/pub/gps/products
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+ - ftp://igs.ign.fr/pub/igs/products/mgex
+ - ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- 【Snx】
+- 【Iono】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/ionex
+ - ftp://igs.ign.fr/pub/igs/products/ionosphere
+ - ftp://igs.gnsswhu.cn/pub/gps/products/ionex
+- 【Trop】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/tropo sphere/zpd
+ - ftp://igs.ign.fr/pub/igs/products/troposphere
+ - ftp://igs.gnsswhu.cn/pub/gps/products/troposphere/new
+ - ftp://ftp.aiub.unibe.ch/CODE
+- 【Eop】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products
+ - ftp://igs.ign.fr/pub/igs/products
+ - ftp://igs.gnsswhu.cn/pub/gps/products
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/mgex
+ - ftp://igs.ign.fr/pub/igs/products/mgex
+ - ftp://igs.gnsswhu.cn/pub/gps/products/mgex
+- 【Atx】
+ - https://files.igs.org/pub/station/general/
+- 【Roti】
+ - ftps://gdc.cddis.eosdis.nasa.gov/pub/gnss/products/ionex
+ - ftp://igs.ign.fr/pub/igs/products/ionosphere
+ - ftp://igs.gnsswhu.cn/pub/gps/products/ionex
+```
+
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2013-\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2013-\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf"
deleted file mode 100644
index cdccfb5..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2013-\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf"
deleted file mode 100644
index 7af4767..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf"
deleted file mode 100644
index 474f9d6..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf"
deleted file mode 100644
index 35ae246..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf"
deleted file mode 100644
index c673862..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf"
deleted file mode 100644
index 73b19af..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf"
deleted file mode 100644
index 2534269..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf"
deleted file mode 100644
index f97ac7a..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf"
deleted file mode 100644
index 121c34c..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf"
deleted file mode 100644
index 64a81b8..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf"
deleted file mode 100644
index f1da228..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf"
deleted file mode 100644
index b044a76..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf"
deleted file mode 100644
index 95af102..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf"
deleted file mode 100644
index 2f452c5..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf"
deleted file mode 100644
index 1063099..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf"
deleted file mode 100644
index 76a1441..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf"
deleted file mode 100644
index 770b6e5..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf"
deleted file mode 100644
index 975f2fe..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf"
deleted file mode 100644
index 3f37b11..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf"
deleted file mode 100644
index 29ac85c..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf"
deleted file mode 100644
index 4b0a2fd..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf"
deleted file mode 100644
index fcf3dce..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf"
deleted file mode 100644
index f0d830a..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf"
deleted file mode 100644
index 47a84c0..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf"
deleted file mode 100644
index b2cd279..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf"
deleted file mode 100644
index 433cff5..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf"
deleted file mode 100644
index 5ed90c2..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf"
deleted file mode 100644
index c2aca57..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf"
deleted file mode 100644
index 1600e63..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf"
deleted file mode 100644
index 4ba869a..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf"
deleted file mode 100644
index 730e301..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf"
deleted file mode 100644
index f87972b..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf" and /dev/null differ
diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf"
deleted file mode 100644
index d38ff9e..0000000
Binary files "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf" and /dev/null differ
diff --git "a/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md"
index f326a22..4138542 100644
--- "a/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md"
+++ "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md"
@@ -203,8 +203,6 @@ TIA 输出幅度很小(<200 mV)的模拟信号,而 TDC 则需要数字信
因此,这是激光雷达的最终方案:
-
-
激光雷达印刷电路板的跟踪并不容易,因为电路板上的激光节点含有超过 15A 的电流,光电二极管节点含有微安培的光电流。我决定制作一个四层电路板,因为这是组织高质量接地多边形的唯一方法--在四层电路板的情况下,内层之一仅用于接地多边形。从原理图中可以看到,我将所有激光雷达接地分为三种类型--激光节点接地 (LGND)、电机节点接地 (MGND)、主接地多边形 (GND)。这些地线只连接了几个点。为了减少激光器电路中的电感,必须将激光器 D4、晶体管 Q2、R19 和 C17 放在尽可能靠近的位置 - 事实上,当激光器打开时,通过这些元件的电流是短路的。
激光雷达印刷电路板的跟踪并不容易,因为电路板上的激光节点含有超过 15A 的电流,光电二极管节点含有微安培的光电流。我决定制作一个四层电路板,因为这是组织高质量接地多边形的唯一方法--在四层电路板的情况下,内层之一仅用于接地多边形。从原理图中可以看到,我将所有激光雷达接地分为三种类型--激光节点接地 (LGND)、电机节点接地 (MGND)、主接地多边形 (GND)。这些地线只连接了几个点。