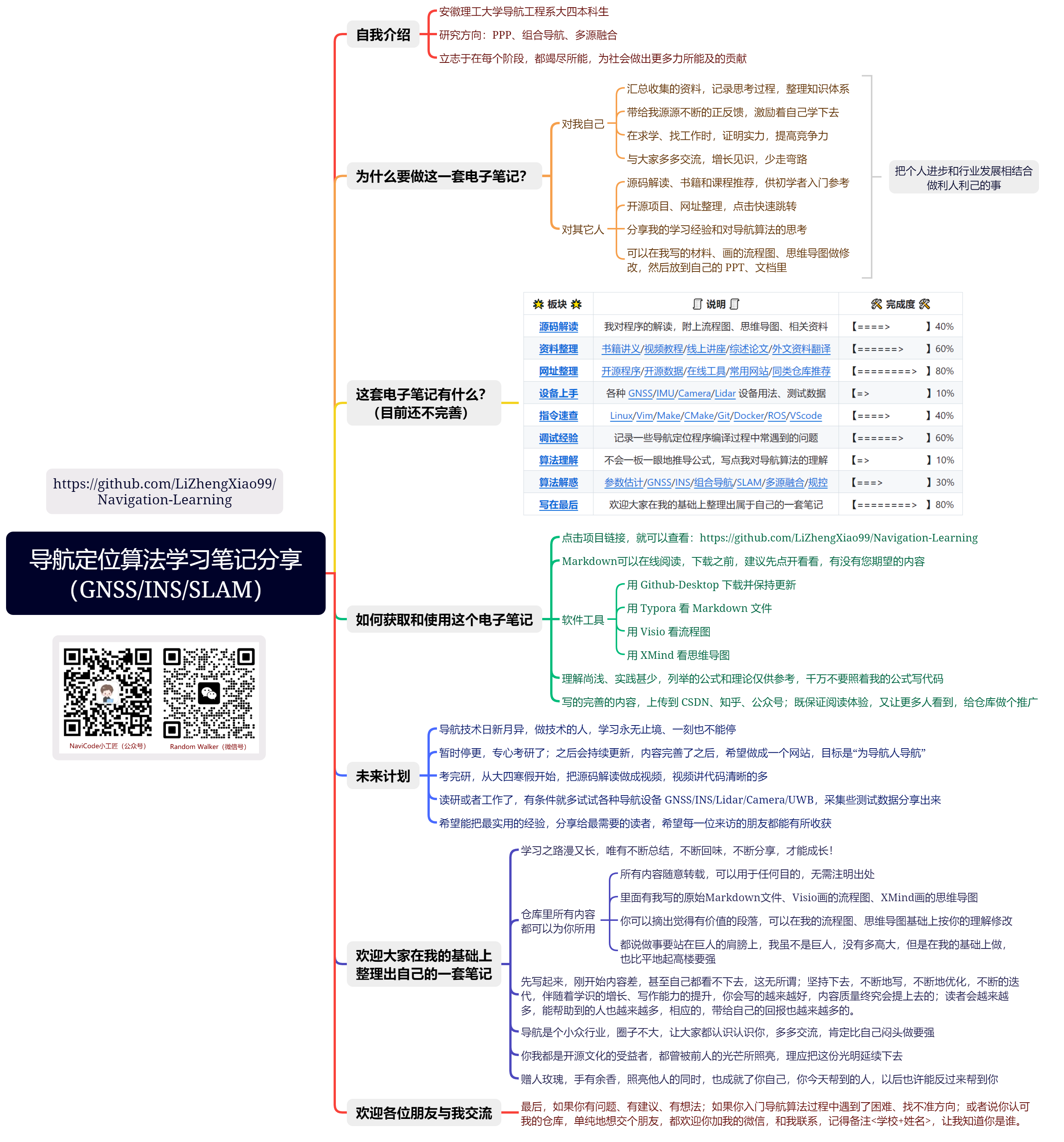
👇 以下是本仓库包含的板块,点击跳转 👇
-
-
-
| 🌟 板块 🌟 | 🧾 说明 🧾 | 🛠 完成度 🛠 |
| :---------------------------------------------: | :----------------------------------------------------------: | :----------------------------------------------------------: |
|
**源码解读** | 我对程序的解读,附上流程图、思维导图、相关资料 |
【\=\=\=\=\> 】40% |
@@ -60,6 +53,7 @@
+
| 🌟 开源程序 🌟 | 🧾 简介 🧾 | 🛠 完成度 🛠 |
| :---------------------------------------------: | :------------------------------: | :----------------------------------------------------------: |
|
**RTKLIB** | 最知名的 GNSS 数据处理程序 |
【\=\=\=\=\=\=\> 】60% |
@@ -87,6 +81,7 @@
+
| 🌟 开源项目 🌟 | 🧾 简介 🧾 | 更新 |
| :----------------------------------------------------------: | :----------------------------------------------------------: | :--: |
| **[GitHub-Chinese-Top-Charts](https://github.com/GrowingGit/GitHub-Chinese-Top-Charts)** | GitHub 中文资料排行榜 | √√√ |
@@ -135,6 +130,7 @@
+
| 类型 | 项目/网址 |
| :----------------------------------------------------------: | :----------------------------------------------------------: |
| [**GNSS 数据处理**](导航定位建图开源项目记录.md#GNSS) | **[RTKLIB](https://www.rtklib.com/)**、[RTKLIB-Demo5](https://github.com/rtklibexplorer/RTKLIB)、[learning_rtklib](https://github.com/LiZhengXiao99/learning_rtklib)、[rtklib-py](https://github.com/rtklibexplorer/rtklib-py)、[pyrtklib](https://github.com/IPNL-POLYU/pyrtklib)、[GPS-RTKLIB-ARM-F407VG](https://github.com/ngochieu642/GPS-RTKLIB-ARM-F407VG)、[MALIB](https://github.com/JAXA-SNU/MALIB)、[MatRTKLIB](https://github.com/taroz/MatRTKLIB)、[Taroz-gsdc2023](https://github.com/taroz/gsdc2023)、[CSSRLib](https://github.com/hirokawa/cssrlib)、[rtklib_ros_bridge](https://github.com/MapIV/rtklib_ros_bridge)、[FiPPP](https://github.com/HuChao-gnss/FiPPP)、[rtkrcv_ros](https://github.com/ajbfinesc/rtkrcv_ros)、**[GAMP](https://geodesy.noaa.gov/gps-toolbox/GAMP.htm)**、[GAMPII-GOOD](https://github.com/zhouforme0318/GAMPII-GOOD)、**[Ginan](https://github.com/GeoscienceAustralia/ginan)**、**[goGPS](https://github.com/goGPS-Project/goGPS_MATLAB)**、[goGPS_Java](https://github.com/goGPS-Project/goGPS_Java)、[BNC](https://igs.bkg.bund.de/ntrip/bnc)、[GREAT-PVT](https://github.com/GREAT-WHU/GREAT-PVT)、[GFZRNX](https://dataservices.gfz-potsdam.de/panmetaworks/showshort.php?id=escidoc:1577894)、[GNSSLogger](https://github.com/google/gps-measurement-tools)、[georinex](https://github.com/geospace-code/georinex)、[GAMIT/GLOBK](http://geoweb.mit.edu/gg/)、[GraphGNSSLib](https://github.com/weisongwen/GraphGNSSLib)、[NavCodeMonitor](https://github.com/weisongwen/NavCodeMonitor)、[Net_Diff](https://github.com/YizeZhang/Net_Diff)、[laika](https://github.com/commaai/laika)、[CSRS-PPP](https://webapp.csrs-scrs.nrcan-rncan.gc.ca/geod/tools-outils/ppp.php)、[POSGO](https://github.com/lizhengnss/POSGO)、[Pride-PPPAR](https://github.com/PrideLab/PRIDE-PPPAR)、[PPPwizard](http://www.ppp-wizard.net/)、[GPSTk](https://github.com/SGL-UT/GPSTk)、[gnsstk](https://github.com/SGL-UT/gnsstk)、[gnsstk-apps](https://github.com/SGL-UT/gnsstk-apps)、[G-NUT/Anubis](https://www.pecny.cz/Joomla25/index.php/gnss/sw/anubis)、[Teqc](https://www.unavco.org/software/data-processing/teqc/teqc.html)、[RNXQCE](https://github.com/cuizilu/RNXQCE)、[Bernese](https://www.bernese.unibe.ch/)、[gLAB](https://github.com/valgur/gLAB?tab=readme-ov-file)、[Look4Sat](https://github.com/rt-bishop/Look4Sat)、[RobustGNSS](https://github.com/wvu-navLab/RobustGNSS)、[ntrip](https://github.com/sevensx/ntrip)、[rtcm](https://github.com/Node-NTRIP/rtcm)、[cors](https://github.com/Erensu/cors)、[VrsCaster](https://github.com/DoubleString/VrsCaster)、[gstream](https://github.com/Jin-Whu/gstream)、[ogrp](https://github.com/Fraunhofer-IIS/ogrp)、[centipede](https://github.com/CentipedeRTK/centipede)、[TouchRTKStation](https://github.com/taroz/TouchRTKStation)、[rtkbase](https://github.com/Stefal/rtkbase)、[GREAT-IFCB](https://github.com/GREAT-WHU/GREAT-IFCB)、[gnss_comm](https://github.com/HKUST-Aerial-Robotics/gnss_comm)、[PPP-BayesTree](https://github.com/wvu-navLab/PPP-BayesTree)、[gnsspy](https://github.com/GNSSpy-Project/gnsspy)、[gnssgo](https://github.com/FengXuebin/gnssgo)、[raPPPid](https://github.com/TUW-VieVS/raPPPid)、[gnss-compass-ros](https://github.com/MapIV/gnss_compass_ros)、[gnss-attitude](https://github.com/low-earth-orbit/gnss-attitude)、[FCB-FILES](https://github.com/FCB-SGG/FCB-FILES)、[MG_APP](https://github.com/XiaoGongWei/MG_APP)、[gps_amcl](https://github.com/midemig/gps_amcl)、[deep_gnss](https://github.com/Stanford-NavLab/deep_gnss)、[TSAnalyzer](https://github.com/wudingcheng/TSAnalyzer)、[GNSS-TimeSeries-Viewers](https://github.com/kmaterna/GNSS_TimeSeries_Viewers)、[RTKinGSS](https://github.com/shaolinbit/RTKinGSS)、[gnss_lib_py](https://github.com/Stanford-NavLab/gnss_lib_py)、[PNT-Integrity](https://github.com/cisagov/PNT-Integrity)、[GORS](https://github.com/lengyanyanjing/GORS)、[GDDS](https://geodesy.noaa.gov/gps-toolbox/gdds.shtml)、[FAST](https://github.com/ChangChuntao/FAST)、[QGOPDD](https://github.com/yhw605/QGOPDD)、[gnss-downloader](https://github.com/Mereithhh/gnss-downloader)、[groops](https://github.com/groops-devs/groops)、[georb](https://github.com/Thomas-Loudis/georb)、[madocalib](https://github.com/QZSS-Strategy-Office/madocalib)、[OREKIT](https://link.zhihu.com/?target=https%3A//www.orekit.org/)、[rt-clk-service](https://github.com/DoubleString/rt-clk-service)、[polaris](https://github.com/PointOneNav/polaris)、[gnss-tec](https://github.com/gnss-lab/gnss-tec)、[utm](https://github.com/sfegan/utm)、[PW-from-GPS](https://github.com/ZiskinZiv/PW_from_GPS)、[GNSS-Multipath-Analysis-Software](https://github.com/paarnes/GNSS_Multipath_Analysis_Software)、[gnss-multipath-detector](https://github.com/EvgeniiMunin/gnss-multipath-detector)、[GNSS-Shadowing](https://github.com/xaedes/GNSS-Shadowing)、[gnssIR-python](https://github.com/kristinemlarson/gnssIR_python)、[GARNO](https://github.com/geoios/GARNO)、[GPSPACE](https://github.com/CGS-GIS/GPSPACE)、[GNSSDataQC](https://github.com/GNSS-FUN/GNSSDataQC)、[gnssr-synth](https://github.com/purnelldj/gnssr_synth)、[gnssIR-matlab-v3](https://github.com/kristinemlarson/gnssIR_matlab_v3)、[gnssrefl](https://github.com/kristinemlarson/gnssrefl)、[gnss2tws-green](https://github.com/jzshhh/gnss2tws_green)、[gnssSNR](https://github.com/kristinemlarson/gnssSNR)、[mphw](https://github.com/fgnievinski/mphw)、[hgpt_model](https://github.com/pjmateus/hgpt_model)、[GNSSR_MERRByS](https://github.com/pjalesSSTL/GNSSR_MERRByS)、[PyGPSClient](https://github.com/semuconsulting/PyGPSClient)、[STM32Primer2-GNSS-Tracker](https://github.com/nemuisan/STM32Primer2_GNSS_Tracker)、[STM32-GNSS](https://github.com/SimpleMethod/STM32-GNSS)、[GNSSTimeServer](https://github.com/Montecri/GNSSTimeServer)、[GNSS_Clock](https://github.com/stevemarple/GNSS_Clock)、[AgOpenGPS](https://github.com/farmerbriantee/AgOpenGPS)、[nmea-msgs](https://github.com/ros-drivers/nmea_msgs)、[LilyGo-LoRa-Series](https://github.com/Xinyuan-LilyGO/LilyGo-LoRa-Series)、[HASlib](https://github.com/nlsfi/HASlib)、[HASPPP](https://github.com/ZhangRunzhi20/HASPPP)、[OSNMA](https://github.com/Algafix/OSNMA)、[galileo-osnma](https://github.com/daniestevez/galileo-osnma)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[geodetic_utils](https://github.com/ethz-asl/geodetic_utils)、[ppp-tools](https://github.com/aewallin/ppp-tools)、[gpstest](https://github.com/barbeau/gpstest)、[iSniff-GPS](https://github.com/hubert3/iSniff-GPS)、[hypatia](https://github.com/snkas/hypatia)、[gps-measurement-tools](https://github.com/google/gps-measurement-tools)、[FE-GUT](https://github.com/zhaoqj23/FE-GUT)、[gnss-RX](https://github.com/HeryMwenegoha/gnss-RX)、[Pypredict](https://github.com/spel-uchile/Pypredict)、[novatel-gps-driver](https://github.com/swri-robotics/novatel_gps_driver)、[GNSSAMS](https://github.com/GanAHE/GNSSAMS)、[GNSS-Radar](https://github.com/taroz/GNSS-Radar)、[geodesy_modeling](https://github.com/kmaterna/geodesy_modeling)、[gnss-odometry](https://github.com/mgoar/gnss-odometry)、[Caster_Project](https://github.com/KOROyo123/Caster_Project)、[rviz_satellite](https://github.com/nobleo/rviz_satellite)、[gnatss](https://github.com/seafloor-geodesy/gnatss)、[gnssr_lowcost](https://github.com/purnelldj/gnssr_lowcost)、[satellite-position-calculation-mapping](https://github.com/egemengulpinar/satellite-position-calculation-mapping)、[SatellitePosition](https://github.com/LStudioLoren/SatellitePosition)、[GNSSTool](https://github.com/quectel-open-source/GNSSTool)、[pynex](https://github.com/swift-nav/pynex)、[pygnssutils](https://github.com/semuconsulting/pygnssutils)、[flipperzero-gps](https://github.com/ezod/flipperzero-gps)、[ROS-GPS](https://github.com/sigmaai/ROS-GPS)、[rtk-rs](https://github.com/rtk-rs)、[ge-gnss-visibility](https://github.com/taroz/ge-gnss-visibility)、[OpenRTK](https://github.com/AndreasArendt/OpenRTK)、[GNSS_RTK](https://github.com/SupakunZ/GNSS_RTK)、[LEOGPS](https://github.com/sammmlow/LEOGPS)、[GPSToolbox 投稿](https://geodesy.noaa.gov/gps-toolbox/exist.htm)、[barbeau-awesome-gnss 整理](https://github.com/barbeau/awesome-gnss)、[hdkarimi-awesome-gnss 整理](https://github.com/hdkarimi/awesome-gnss)、[mcraymer 整理](https://mcraymer.github.io/geodesy/index.html)、[Awesome-Geospatial 整理](https://github.com/sacridini/Awesome-Geospatial)、[GISResourcce 整理](https://gisresources.com/) |
@@ -162,6 +158,7 @@
+
| 类型 | 网址 |
| :------------------: | :----------------------------------------------------------: |
| 中文期刊 | [测绘学报](http://xb.chinasmp.com/CN/1001-1595/home.shtml)、[武汉大学学报(信息科学版)](http://ch.whu.edu.cn/)、[测绘地理信息](http://chdlxx.whu.edu.cn/homeNav?lang=zh)、[电子学报](https://www.ejournal.org.cn/CN/home)、[遥感学报](https://www.ygxb.ac.cn/)、[地理学报](https://www.geog.com.cn/)、[地理科学进展](https://www.progressingeography.com/)、[科学通报](https://www.sciengine.com/CSB/home?slug=abstracts&abbreviated=scp)、[现代测绘](http://www.xdchzz.cn/)、[测绘工程](https://www.xueshu.com.cn/cehgc/)、[测绘通报](http://tb.chinasmp.com/CN/0494-0911/home.shtml)、[信号处理](https://signal.ejournal.org.cn/)、[中国惯性技术](http://www.zggxjsxb.com/CN/1005-6734/home.shtml)、[地球物理学报](http://www.geophy.cn/)、[大地测量与地球动力学](http://www.jgg09.com/CN/volumn/current.shtml)、[全球定位系统](http://www.qqdwxt.cn/)、[导航定位学报](https://dhdwxb.chinajournal.net.cn/WKC/WebPublication/index.aspx?mid=chwz)、[地理空间信息](https://dxkj.chinajournal.net.cn/WKE2/WebPublication/index.aspx?mid=DXKJ)、[海洋预报](http://www.hyyb.org.cn/)、[仪器仪表学报](http://yqyb.etmchina.com/yqyb/home)、[导航定位与授时](http://pnt.ijournals.cn/dhdwyss/ch/index.aspx)、[地球科学与环境学报](http://jese.chd.edu.cn/)、[弹箭与制导学报](https://djzd.cbpt.cnki.net/WKD3/WebPublication/index.aspx?mid=djzd)、[微电子与计算机](http://www.journalmc.com/)、[西北工业大学学报](https://journals.nwpu.edu.cn/xbgydxxb/CN/volumn/current.shtml)、[宇航学报](https://www.yhxb.org.cn/homeNav?lang=zh)、[仪表技术与传感器](http://www.17sensor.com/#/)、[测控技术](http://ckjs.ijournals.cn/ckjs/ch/index.aspx)、[系统仿真学报](https://www.china-simulation.com/CN/1004-731X/home.shtml)、[航天控制](http://htkz.magtechjournal.com/CN/home)、[兵工自动化](http://bgzdh.ijournals.com.cn/bgzdh/home)、[光学学报](https://www.opticsjournal.net/Journals/gxxb.cshtml)、[中国激光](https://www.opticsjournal.net/Journals/zgjg.cshtml)、[光电子激光](http://www.joelcn.com/ch/index.aspx) |
@@ -197,6 +194,7 @@
+
| 工具 | 开发者 | 简介 | 账号 |
| :----------------------------------------------------------: | :--------: | :----------------------------------------------------------: | :--- |
| **[GNSS-Calendar](https://www.gnsscalendar.com/)** | Enes·Jahic | 在日历上选择年月日,可以转换到年积日、儒略日、GPS周、周内天,并且提供 GPS 和 GLONASS 的精密轨道钟差、SNX、ION、DCB 文件的下载链接。 | 无需 |
@@ -479,6 +477,7 @@
+
👆👆👆 百度网盘链接 or 回到开头 👆👆👆
---
@@ -712,6 +711,7 @@
+
👆👆👆 回到开头 👆👆👆
---
@@ -1124,6 +1124,7 @@
+
👆👆👆 回到开头 👆👆👆
@@ -1134,6 +1135,7 @@
+
###  +
+ 
 -
-  -
-  -
-  -
-  -
-  -
-