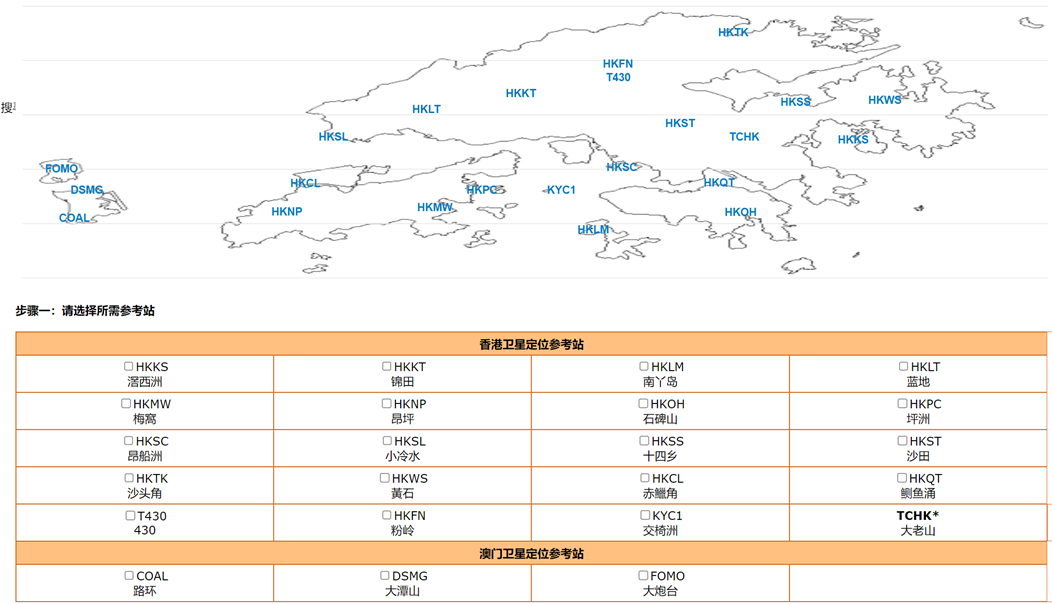
http://igmas.users.sgg.whu.edu.cn/home | +| **武大耿江辉团队** | GREC | OSB | ftp://igs.gnsswhu.cn/pub/whu/phaseblas | +| **CAS** | GREC | OSB | ftp://ftp.gipp.org.cn/product/dcb/mgex/ | +| **GFZ** | GREC | 宽巷UPD+相位种 | ftp://igs.ign.fr/pub/igs/products/mgex | +| **CNES** | GR | 宽巷UPD+整数钟 | ftp://ftpsedr.cls.fr/pub/igsac | +| **CODE** | GR | OSB | http://ftp.aiub.unibe.ch/CODE/ | + + + + + +#### 7. IGS SINEX 解(snx) + +> 格式说明:https://www.iers.org/IERS/EN/Organization/AnalysisCoordinator/SinexFormat/sinex.html + + + + + +#### 8. 对流层延迟(yyzpd、TRO) + +> 格式说明:https://files.igs.org/pub/data/format/sinex_tro_v2.00.pdf + + + + + +#### 9. 电离层延迟(yyi、yyI) + +> 格式说明:https://files.igs.org/pub/data/format/ionex1.pdf + + + + + +#### 10. 电离层TEC变化率指数(ROTI) + +> 格式说明:https://files.igs.org/pub/data/format/ionex1.pdf + + + + + +#### 11. 天线相位中心改正(atx) + +> 格式说明:https://files.igs.org/pub/data/format/antex14.txt + + + +### 2、CORS 网 + +#### 1. IGS/MGEX + + + +MGEX 数据才支持北斗 + + + +#### 2. 科廷大学短基线数据 + +> http://saegnss2.curtin.edu.au/ldc/ + + + + + +#### 3. 香港 CORS 网 + +> **HTTP**:https://www.geodetic.gov.hk/sc/rinex/downv.aspx +> +> **FTP**:[ftp://ftp.geodetic.gov.hk](ftp://ftp.geodetic.gov.hk/)[/](ftp://ftp.geodetic.gov.hk/) + +香港卫星定位参考站网由18个平均分布于全港各处的连续运行参考站 (CORS) 组成(包括16个参考站及2个完整性监测站),可免费下载使用,数据分辨率有1s、5s、30s三种。 + +
 +
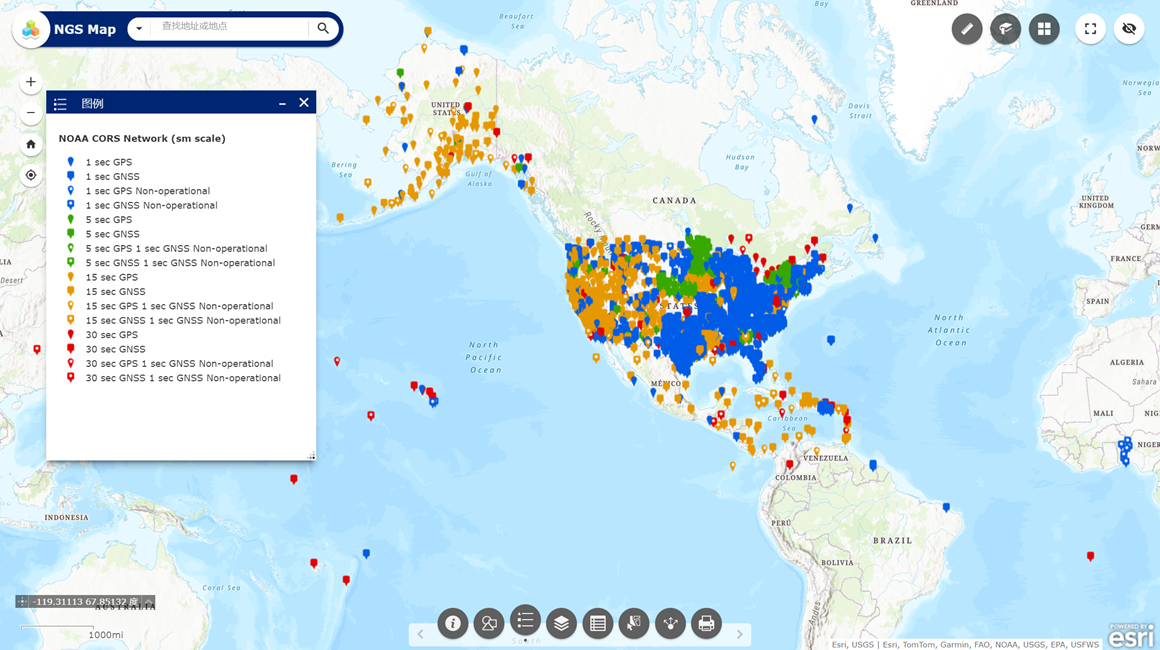
+#### 4. 美国国家大地测量CORS观测数据
+
+> **官网介绍**:https://geodesy.noaa.gov/CORS/
+>
+> **测站地图图**:https://arcg.is/18fWq8
+>
+> **AWS**:https://noaa-cors-pds.s3.amazonaws.com/index.html
+>
+> **HTTP**:https://geodesy.noaa.gov/corsdata/
+
+
+
+#### 4. 美国国家大地测量CORS观测数据
+
+> **官网介绍**:https://geodesy.noaa.gov/CORS/
+>
+> **测站地图图**:https://arcg.is/18fWq8
+>
+> **AWS**:https://noaa-cors-pds.s3.amazonaws.com/index.html
+>
+> **HTTP**:https://geodesy.noaa.gov/corsdata/
+
+ +
+
+
+
+
+#### 5. 欧洲CORS观测数据
+
+> **官网介绍**:https://epncb.oma.be/
+>
+> **论文**:https://epncb.oma.be/_documentation/papers/Bruyninx_EPNCB_2019.pdf
+>
+> **测站地图**:https://epncb.oma.be/_networkdata/stationmaps.php
+>
+> **FTP**:[ftp://ftp.epncb.oma.be/pub/obs](ftp://ftp.epncb.oma.be/pub/obs)
+
+
+
+
+
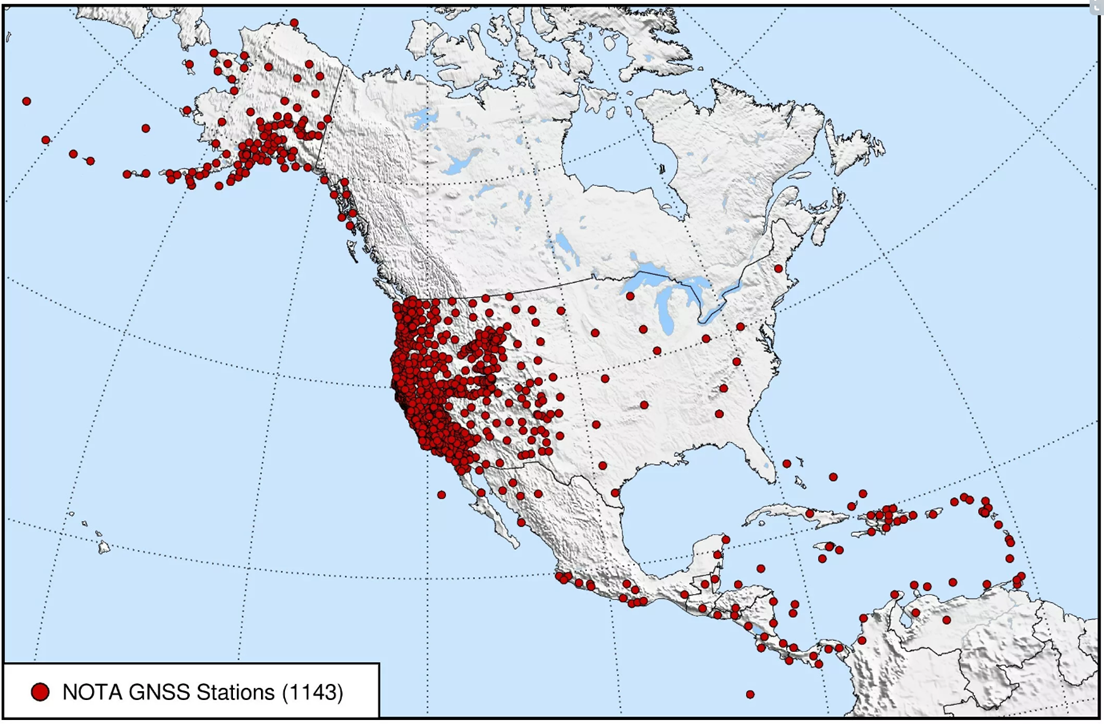
+#### 6. 美国国家科学基金会地球观测计划的板块边界观测站观测数据
+
+> **官网介绍**:https://www.unavco.org/projects/past-projects/pbo/pbo.html
+>
+> **PDF**:https://www.unavco.org/projects/past-projects/pbo/lib/docs/dms_cdr.pdf
+
+
+
+
+
+
+
+#### 5. 欧洲CORS观测数据
+
+> **官网介绍**:https://epncb.oma.be/
+>
+> **论文**:https://epncb.oma.be/_documentation/papers/Bruyninx_EPNCB_2019.pdf
+>
+> **测站地图**:https://epncb.oma.be/_networkdata/stationmaps.php
+>
+> **FTP**:[ftp://ftp.epncb.oma.be/pub/obs](ftp://ftp.epncb.oma.be/pub/obs)
+
+
+
+
+
+#### 6. 美国国家科学基金会地球观测计划的板块边界观测站观测数据
+
+> **官网介绍**:https://www.unavco.org/projects/past-projects/pbo/pbo.html
+>
+> **PDF**:https://www.unavco.org/projects/past-projects/pbo/lib/docs/dms_cdr.pdf
+
+ +
+
+
+
+
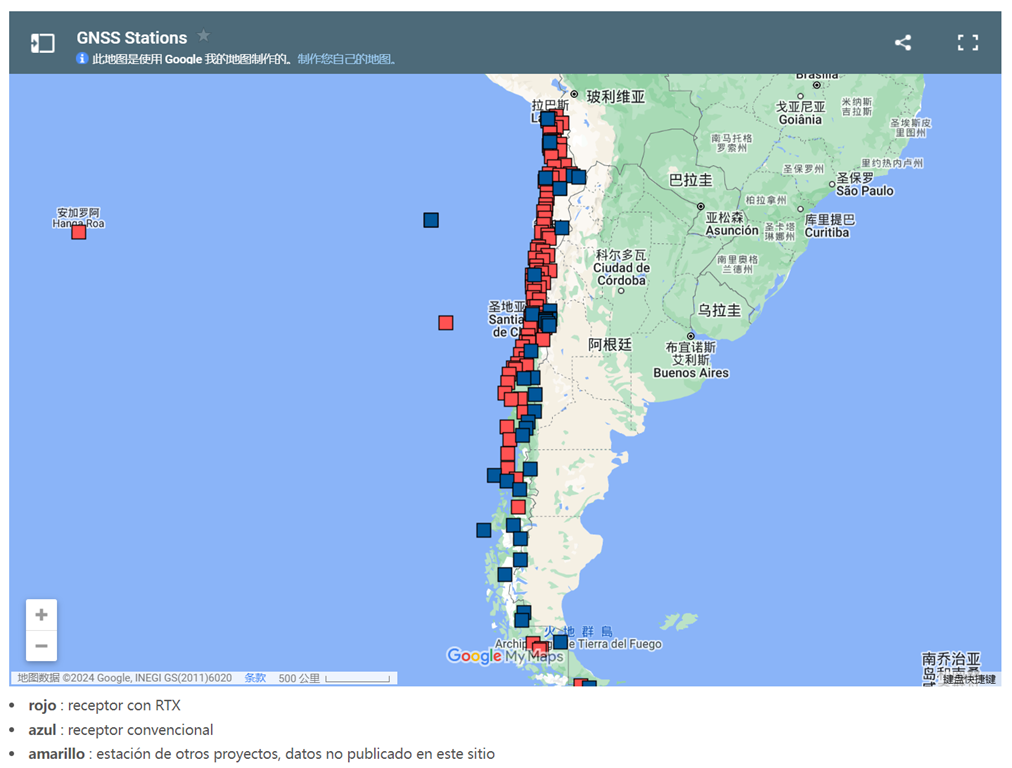
+#### 7. 智利观测数据
+
+> 官网介绍:[https://gps.csn.uchile.cl](https://gps.csn.uchile.cl/)[/](https://gps.csn.uchile.cl/)
+>
+> 数据下载:[https://gps.csn.uchile.cl/data](https://gps.csn.uchile.cl/data/)[/](https://gps.csn.uchile.cl/data/)
+
+官网的测站图是调用谷歌地图的接口来实现的,所以国内直连无法
+
+
+
+
+
+
+
+#### 7. 智利观测数据
+
+> 官网介绍:[https://gps.csn.uchile.cl](https://gps.csn.uchile.cl/)[/](https://gps.csn.uchile.cl/)
+>
+> 数据下载:[https://gps.csn.uchile.cl/data](https://gps.csn.uchile.cl/data/)[/](https://gps.csn.uchile.cl/data/)
+
+官网的测站图是调用谷歌地图的接口来实现的,所以国内直连无法
+
+ +
+
+
+#### 8. Geoscience Australia
\ No newline at end of file
diff --git "a/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/Determination of differential code biases with multi-GNSS observations.pdf" "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/Determination of differential code biases with multi-GNSS observations.pdf"
new file mode 100644
index 0000000..a8f9f22
Binary files /dev/null and "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/Determination of differential code biases with multi-GNSS observations.pdf" differ
diff --git "a/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md" "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md"
new file mode 100644
index 0000000..67b5041
--- /dev/null
+++ "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md"
@@ -0,0 +1,499 @@
+
+
+
+[TOC]
+
+## 一、GAMP-GOOD 快速上手
+
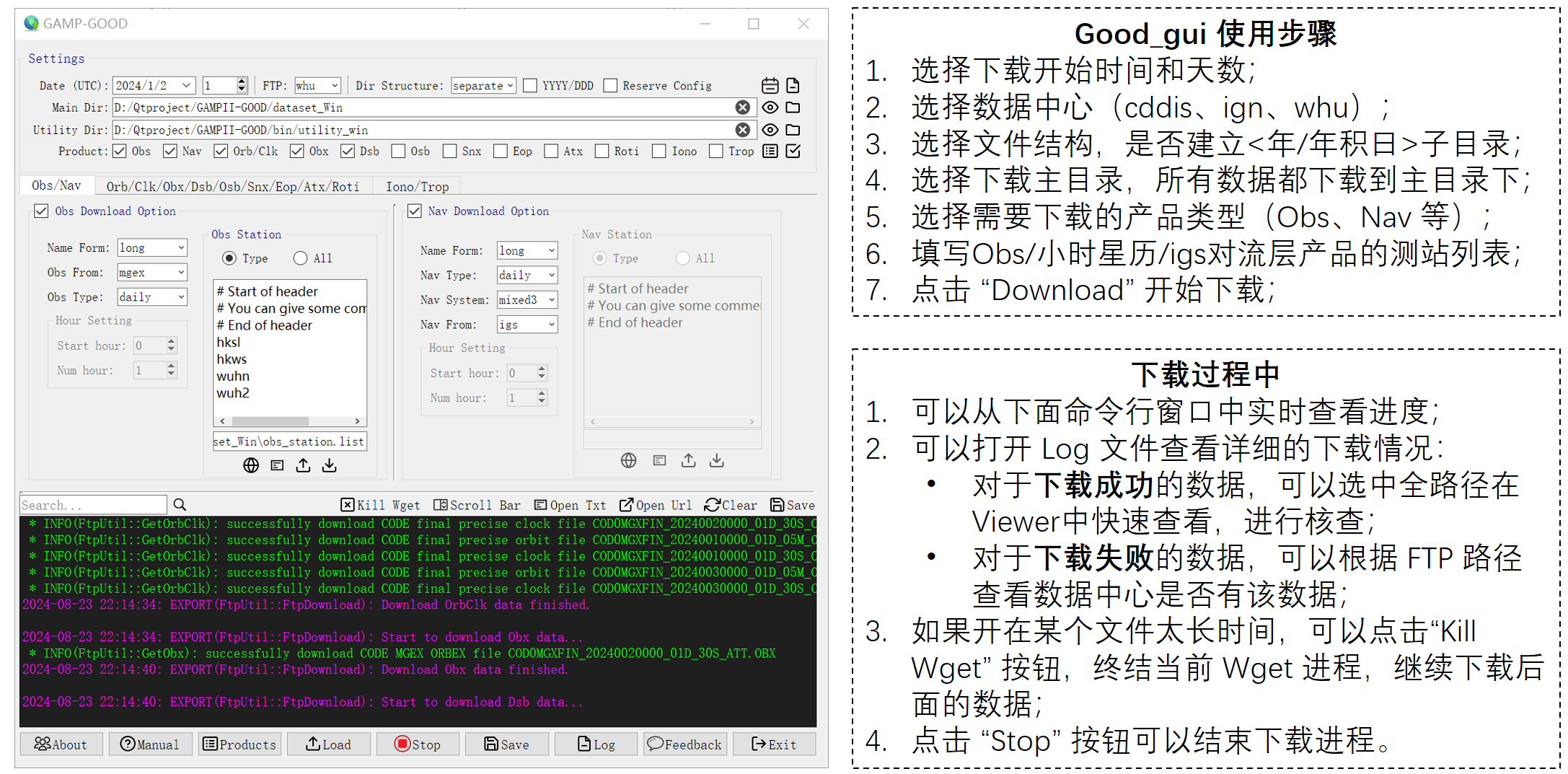
+GAMP-GOOD 由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt界面可执行程序 Good_Gui 三部分组成,自2021年4月1.0版本至今已历经 15 个版本迭代,目前已实现常用 GNSS 观测值、广播星历、精密卫星轨道和钟差(实时、超快、快速、最终)、地球定向参数、卫星姿态ORBEX、DCB/DSB/OSB、SINEX周解、电离层和对流层延迟产品、天线相位中心等产品下载。
+
+| 数据类型 | 用处 |
+| :--------------------------------------: | :---------------------------------------: |
+| IGS观测数据 (RINEX 2.xx, 短文件名) | 多用于GPS定轨、估钟、PPP算法验证等 |
+| MGEX观测数据 (RINEX 3.xx, 长文件名) | 多用于多系统GNSS定轨、估钟、PPP算法验证等 |
+| 科廷科技大学短基线 CORS 观测值 | 多用于短基线RTK算法验证 |
+| 澳大利亚地球科学局 (GA) 观测值 | 多用于BDS-2/3 UPD估计、PPP算法验证等 |
+| 香港CORS观测值(RINEX 3.xx, 长文件名) | 多用于海潮、GNSS水汽、电离层延迟建模等 |
+| 广播星历 (yyg/yyn/yyp 等) | 多用于SPP、RTK解算中的卫星坐标与钟差计算 |
+| IGS 与 MGEX 各分析中心精密轨道和钟差产品 | 多用于PPP解算中的卫星轨道和钟差计算 |
+| 地球自转参数 | 多用于计算极潮改正 |
+| IGS SINEX周解/天解 | 多用作定位算法验证的参考坐标 |
+| CODE或MGEX差分码偏差 | 多用于改正伪距硬件延迟 |
+| 全球电离层图 (GIM) | 全球电离层延迟产品 |
+| 全球电离层闪烁 (ROTI) | 多用于电离层不规则体和闪烁研究 |
+| CNES离线实时轨道/钟差/相位小数偏差产品 | 用于实时PPP算法验证、实时PPP模糊度固定等 |
+| IGS天线相位中心改正 (ANTEX) | 用于卫星和接收机天线相位中心改正 |
+
+### 1、Good-Gui:Qt 界面数据下载程序
+
+
+
+
+
+
+
+
+
+### 2、Good-Cui:命令行数据下载程序
+
+
+
+
+
+
+
+
+
+### 3、YAML 格式配置文件说明
+
+YAML(YAML Ain't Markup Language)是一种轻量级的数据序列化格式,可以用于配置文件、数据交换、API 请求等多种场景。它是一种简单易用的数据序列化格式,使得数据可以以人类易读的方式进行存储和传输。语法非常简单,使用缩进和符号来表示数据结构,需要注意以下激光问题:
+
+> 1. 大小写敏感;
+> 2. 缩进不允许使用 Tab,只允许空格;
+> 3. 缩进的空格数不重要,只要相同层级的元素左对齐即可;
+> 4. 键和冒号之间无空格,冒号和值之间要加空格;
+> 5. `#` 后面是注释;
+
+配置文件以 **数组 + 键值对** 的方式组织,每一个键值对都是一个配置项,GAMP-GOOD 配置文件包含以下配置项:
+
+1. 目录:
+
+ > * 各类数据下载的子目录(Obs/Nav/Orb等)都继承自主目录(填相对路径);
+ > * wget/gzip/crx2rnx 的目录以及 Obs/Nav/Trop 测站列表文件可以继承自主目录(填相对路径),也可以独立于主目录之外(填绝对路径)。
+
+2. `procTime`:数据下载的开始时间,支持三种形式:
+
+ ```cpp
+ - 1 年/月/日 : 1 2024 8 3
+ - 2 年/年积日 : 2 2024 216
+ - 3 GPS周/周内天 : 3 2327 7
+ ```
+
+3. `minusAdd1day`:【0 : 关、1 : 开】选择是否额外下载前一天和后一天的精密星历和精密钟差。
+
+ > 部分 PPP 程序需要用到前天和后一天的精密星历和精密钟差进行插值。
+
+4. `merge_sp3files`:【0 : 关、1 : 开】选择是否合并下载的三天精密星历和钟差。
+
+ > 仅在 minusAdd1day 开启的时候生效。
+
+5. `printInfoWget`:【0 : 关、1 : 开】选择是否在终端显示 Wegt 输出的信息。
+
+ > Qt 界面程序中无效。
+
+6. `ftpDownloading`:
+
+ 1. `opt4ftp`:【0 : 关、1 : 开】数据下载的总开关。
+
+ 2. `ftpArch`:【cddis、ign、whu】选择主要的数据中心,支持 cddis、ign、whu:
+
+ ```cpp
+ - 美国 cddis : ftps://gdc.cddis.eosdis.nasa.gov/pub/
+ - 法国 ign : ftp://igs.ign.fr/pub/
+ - 中国 whu : ftp://igs.gnsswhu.cn/pub/
+ ```
+
+ > * 绝大多数的数据都在选择的数据中心里下载,有部分例外,详见 [GAMP-GOOD 支持下载的产品链接.md](GAMP-GOOD 支持下载的产品链接.md)。
+ > * 一般来说美国的 cddis 数据最全,国内用 whu 下载数据最快。
+
+7. `getObs`:
+
+ 1. `opt4obs`:【0 : 关、1 : 开】观测数据下载的总开关。
+ 2. `obsType`:选择观测数据下载的种类
+ 3. `obsFrom`:
+ 4. `obsList`:
+ 5. `sHH4obs`:
+ 6. `nHH4obs`:
+ 7. `l2s4obs`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+8. `getNav`:
+ 1. `opt4nav`:【0 : 关、1 : 开】
+ 2. `navType`:
+ 3. `navSys`:
+ 4. `navFrom`:
+ 5. `navList`:
+ 6. `sHH4nav`:
+ 7. `nHH4nav`:
+ 8. `l2s4nav`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+9. `getOrbClk`:
+ 1. `opt4oc`:【0 : 关、1 : 开】
+ 2. `ocFrom`:
+ 3. `sHH4oc`:
+ 4. `nHH4oc`:
+ 5. `l2s4oc`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+10. `getEop`:
+
+ 11. `opt4eop`:【0 : 关、1 : 开】
+
+ 12. `eopFrom`:
+
+ 13. `sHH4eop`:
+
+ 14. `nHH4eop`:
+
+ 15. `l2s4eop`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+16. `getObx`:
+ 1. `opt4obx`:【0 : 关、1 : 开】
+ 2. `obxFrom`:
+
+17. `getDsb`:
+
+ 1. `opt4dsb`:【0 : 关、1 : 开】
+ 2. `dsbFrom`:
+
+18. `getOsb`:
+
+ 1. `opt4osb`:【0 : 关、1 : 开】
+ 2. `osbFrom`:
+
+19. `getSnx`:
+ 1. `opt4snx`:【0 : 关、1 : 开】
+ 2. `l2s4snx`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+20. `getIon`:
+ 1. `opt4ion`:
+ 2. `ionFrom`:
+ 3. `l2s4ion`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+21. `getRoti`
+ 1. `opt4rot`:【0 : 关、1 : 开】
+
+22. `getTrp`:
+
+ 1. `opt4trp`:【0 : 关、1 : 开】
+ 2. `trpFrom`:
+ 3. `trpList`:
+ 4. `l2s4trp`:
+
+23. `getAtx`:
+ 1. `opt4atx`:
+
+---
+
+
+
+```yaml
+# The root/main directory of GNSS observations and products -------------------
+mainDir : D:\Projects\proj_VScode\UNIQ\GOOD\dataset_Win
+# The sub-directories of GNSS observations and products, which needs to inherit the path of 'mainDir'
+# i.e., 'orbDir' = 'mainDir' + 'orbDir', which is 'D:\Projects\proj_VScode\UNIQ\GOOD\dataset\orb'
+obsDir : obs # The sub-directory of RINEX format observation files
+navDir : nav # The sub-directory of RINEX format broadcast ephemeris files
+orbDir : orb # The sub-directory of SP3 format precise ephemeris files
+clkDir : clk # The sub-directory of RINEX format precise clock files
+eopDir : eop # The sub-directory of earth rotation/orientation parameter (EOP) files
+obxDir : obx # The sub-directory of MGEX final/rapid and/or CNES real-time ORBEX (ORBit EXchange format) files
+biaDir : bia # The sub-directory of CODE/MGEX differential code/signal bias (DCB/DSB), MGEX observable-specific signal bias (OSB), and/or CNES real-time OSB files
+snxDir : snx # The sub-directory of SINEX format IGS weekly solution files
+ionDir : ion # The sub-directory of CODE/IGS global ionosphere map (GIM) files
+ztdDir : ztd # The sub-directory of CODE/IGS tropospheric product files
+tblDir : tbl # The sub-directory of table files (i.e., ANTEX, ocean tide loading files, etc.) for processing
+logDir : log # The sub-directory of log file
+3partyDir : thirdparty_Win # The sub-directory where third-party softwares (i.e., 'wget', 'gzip', 'crx2rnx' etc) are stored
+
+# Time settings ----------------------------------------------------------------
+procTime : 2 2024 1 1 # The setting of start time for processing, which should be set to '1 year month day ndays' or '2 year doy ndays' or '3 week dow ndays'. NOTE: doy = day of year; week = GPS week; dow = day within week
+
+# Settings of FTP downloading --------------------------------------------------
+minusAdd1day : 1 # (0: off 1: on) The setting of the day before and after the current day for precise satellite orbit and clock products downloading
+merge_sp3files: 1 # (0: off 1: on) to merge three consecutive sp3 files into one file
+printInfoWget : 1 # (0: off 1: on) Printing the information generated by 'wget'
+
+# Handling of FTP downloading --------------------------------------------------
+ftpDownloading: # The setting of the master switch for data downloading
+ opt4ftp: 1 # 1st: (0:off 1:on);
+ ftpArch: whu # 2nd: the FTP archive, i.e., cddis, ign, or whu.
+getObs: # GNSS observation data downloading option
+ opt4obs: 0 # 1st(opt4obs): (0: off 1: on);
+ obsType: daily # 2nd(obsType): 'daily', 'hourly', 'highrate', '30s', '5s', or '1s';
+ obsFrom: mgex # 3rd: 'igs', 'mgex', 'igm', 'cut', 'hk', 'ngs', 'epn', 'pbo', or 'chi';
+ obsList: all # 4th: 'all' (observation files downloaded in the whole directory) or the site list file name (observation files downloaded site-by-site according to the site list file, which needs to inherit the path of 'mainDir');
+ sHH4obs: 01 # 5th: Start hour (00, 01, 02, ...);
+ nHH4obs: 1 # 6th: The consecutive hours, i.e., '01 3' denotes 01, 02, and 03;
+ l2s4obs: 1 # 7th: Valid only for the observation files with long name, 0: long name, 1: short name, 2: long and short name
+ # NOTE: The 5th and 6th items are valid ONLY when the 2nd item 'hourly', 'highrate', '5s', or '1s' is set.
+ # NOTE: If the 3rd item is 'igs', 'mgex', 'igm', the 2nd item can be 'daily', 'hourly', or 'highrate';
+ # If the 3rd item is 'cut', 'ngs', 'epn', or 'pbo', the 2nd item should be 'daily';
+ # If the 3rd item is 'hk', the 2nd item can be 1) '30s', '5s', or '1s' 2) '30s', '05s', or '01s'. However, '30 s', '5 s', or '1 s' is NOT allowed.
+ # NOTE: If the 3rd item is 'hk' 'ngs', or 'pbo', the 4th item should ONLY be the full path of site list.
+ # INFO: The 2nd item 'igs' is for IGS observation (RINEX version 2.xx, short name 'd');
+ # The 2nd item 'mgex' is for MGEX observation (RINEX version 3.xx, long name 'crx');
+ # The 2nd item 'igm' is for the union of IGS and MGEX (IGS + MGEX, while the priority of MGEX sites is higher) observation with respect to the site name;
+ # The 2nd item 'cut' is for Curtin University of Technology (CUT) observation (RINEX version 3.xx, long name 'crx');
+ # The 2nd item 'hk' is for Hong Kong CORS observation (RINEX version 3.xx, long name 'crx');
+ # The 2nd item 'ngs' is for NGS/NOAA CORS observation (RINEX version 2.xx, short name 'd');
+ # The 2nd item 'epn' is for EUREF Permanent Network (EPN) observation (RINEX version 3.xx, long name 'crx' and RINEX version 2.xx, short name 'd');
+ # The 2nd item 'pbo' is for Plate Boundary Observatory (PBO) observation (RINEX version 3.xx, long name 'crx');
+ # The 2nd item 'chi' is for Centro Sismologico Nacional of Universidad de Chile observation (RINEX version 2.xx, short name "d")
+getNav: # Various broadcast ephemeris downloading option
+ opt4nav: 0 # 1st: (0: off 1: on);
+ navType: daily # 2nd: 'daily' or 'hourly';
+ navSys : mixed3 # 3rd: 'gps', 'glo', 'bds', 'gal', 'qzs', 'irn', 'mixed3', 'mixed4', or 'all';
+ navFrom: igs # 4th: Analysis center (i.e., 'igs', 'dlr', 'ign', 'gop', or 'wrd') that carries out the combination of broadcast ephemeris for mixed navigation data. From CDDIS or WHU FTP, 'igs' and 'dlr' can be downloaded, and from IGN, 'igs' and 'ign' can be downloaded. The downloading of 'gop' and/or 'wrd' is via the other FTP addresses;
+ navList: site_mgex.list # 5th: ONLY the site list file name is valid if the 2nd item is 'hourly';
+ sHH4nav: 01 # 6th: Start hour (00, 01, 02, ...);
+ nHH4nav: 2 # 7th: The consecutive hours, i.e., '01 3' denotes 01, 02, and 03;
+ l2s4nav: 2 # 8th: Valid only for the navigation files with long name, 0: long name, 1: short name, 2: long and short name
+ # NOTE: The 5th, 6th, and 7th items are valid ONLY when the 2nd item 'hourly' is set.
+ # NOTE: If the 2nd item is 'daily', the 3rd item should be 'gps', 'glo', 'mixed3', or 'mixed4';
+ # If the 2nd item is 'hourly', the 3rd item can be 'gps', 'glo', 'bds', 'gal', 'qzs', 'irn', 'mixed', or 'all'.
+ # NOTE: The 4th item is valid ONLY when the 3rd item 'mixed3' is set.
+ # NOTE: The 3rd item 'mixed3' is for RINEX 3.xx, while 'mixed4' is for RINEX 4.xx.
+getOrbClk: # Satellite final/rapid/ultra-rapid precise orbit and clock downloading option
+ opt4oc : 1 # 1st: (0: off 1: on);
+ ocFrom : igs+gfz_m # 2nd: Analysis center (i.e., IGS final: 'cod', 'emr', 'esa', 'gfz', 'grg', 'igs', 'jgx', 'jpl', 'mit', 'all', 'cod+igs', 'cod+gfz+igs', ...; MGEX final: 'cod_m', 'gfz_m', 'grg_m', 'iac_m', 'jax_m', 'sha_m', 'whu_m', 'all_m', 'cod_m+gfz_m', 'grg_m+whu_m', ...; rapid: 'cod_r', 'emr_r', 'esa_r', 'gfz_r', 'igs_r'; ultra-rapid: 'esa_u', 'gfz_u', 'igs_u', 'whu_u'; real-time: 'cnt'). NOTE: The option of 'cnt' is for real-time precise orbit and clock products from CNES offline files;
+ sHH4oc : 01 # 3rd: Start hour (00, 06, 12, or 18 for esa_u and igs_u; 00, 03, 06, ... for gfz_u; 01, 02, 03, ... for whu_u).
+ nHH4oc : 2 # 4th: The consecutive sessions, i.e., '00 3' denotes 00, 06, and 12 for esa_u and/or igs_u, 00, 03, and 06 for gfz_u, while 00, 01, and 02 for whu_u.
+ l2s4oc : 2 # 5th: Valid only for the precise orbit and clock files with long name, 0: long name, 1: short name, 2: long and short name
+getEop: # Earth rotation/orientation parameter (ERP/EOP) downloading option
+ opt4eop: 0 # 1st: (0: off 1: on);
+ eopFrom: igs # 2nd: Analysis center (i.e., final: 'cod', 'emr', 'esa', 'gfz', 'grg', 'igs', 'jgx', 'jpl', 'mit'; ultra-rapid: 'esa_u', 'gfz_u', 'igs_u').
+ sHH4eop: 01 # 3rd: Valid ONLY when the 2nd item 'esa_u', 'gfz_u', or 'igs_u' is set.
+ nHH4eop: 4 # 4th: Valid ONLY when the 2nd item 'esa_u', 'gfz_u', or 'igs_u' is set.
+ l2s4eop: 2 # 5th: Valid only for EOP file with long name, 0: long name, 1: short name, 2: long and short name
+getObx: # ORBEX (ORBit EXchange format) for satellite attitude information downloading option
+ opt4obx: 0 # 1st: (0: off 1: on);
+ obxFrom: all # 2nd: Analysis center (i.e., final/rapid: 'cod', 'gfz', 'grg', 'whu', 'all'; real-time: 'cnt'). NOTE: The option of 'cnt' is for real-time ORBEX from CNES offline files.
+getDsb: # Differential code/signal bias (DCB/DSB) downloading option
+ opt4dsb: 0 # 1st: (0: off 1: on);
+ dsbFrom: all # 2nd: Analysis center (i.e., 'cod', 'cas', 'all'). NOTE: DCBs from CODE are for GPS and GLONASS, while DSBs from CAS are for multiple GNSS.
+getOsb: # Observable-specific signal bias (OSB) downloading option
+ opt4osb: 0 # 1st: (0: off 1: on);
+ osbFrom: cas # 2nd: Analysis center (i.e., final/rapid: 'cas', 'cod', 'gfz', 'grg', 'whu', 'all'; real-time: 'cnt'). NOTE: The option of 'cnt' is for real-time OSBs from CNES offline files.
+getSnx: # IGS weekly SINEX downloading option
+ opt4snx: 0 # 1st: (0: off 1: on)
+ l2s4snx: 2 # 2nd: Valid only for IGS weekly SINEX file with long name, 0: long name, 1: short name, 2: long and short name
+getIon: # Global ionosphere map (GIM) downloading option
+ opt4ion: 0 # 1st: (0: off 1: on);
+ ionFrom: cod # 2nd: Analysis center (i.e., final: 'cas', 'cod', 'emr', 'esa', 'igs', 'jpl', 'upc', 'all', 'cas+cod', 'cas+cod+igs', ...;)
+ l2s4ion: 2 # 3rd: Valid only for the ionosphere files with long name, 0: long name, 1: short name, 2: long and short name
+getRoti: # Rate of TEC index (ROTI) downloading option
+ opt4rot: 0 # (0: off 1: on)
+getTrp: # CODE/IGS tropospheric product downloading option
+ opt4trp: 0 # 1st: (0:off 1:on);
+ trpFrom: cod # 2nd: Analysis center (i.e., 'igs' or 'cod');
+ trpList: site_trp.list # 3rd: the file name of site.list. NOTE: It is valid ONLY when the 2nd item 'igs' is set.
+ l2s4trp: 2 # 4th: Valid only for the troposphere files with long name, 0: long name, 1: short name, 2: long and short name
+getAtx: # ANTEX format antenna phase center correction downloading option
+ opt4atx: 0 # (0:off 1:on)
+```
+
+
+
+
+
+
+
+### 4、GA 数据下载脚本使用
+
+
+
+
+
+
+
+### 5、GAMP-GOOD 不支持下载的数据
+
+1. 潮汐文件:
+
+ >
+
+2. 武汉大学李星星老师团队的 UPD 文件
+
+ >
+
+3. GAMIT、PANDA、Bernese 表文件
+
+ >
+
+4.
+
+
+
+### 6、已知存在的问题
+
+1. 无法下载快速/超快速的精密星历、精密钟差、电离层产品
+
+ > 代码暂未实现,将在后续版本更新。
+
+2. 部分小时广播星历下载存在问题
+
+ >
+
+3. 部分 IGS 测站无法下载对流层数据
+
+ > 服务器上没有这些测站的数据。
+
+4. ATX 和 DCB 文件有时候下载很慢
+
+ > * Atx
+
+4. whu 和 grg 的
+
+ >
+
+5. Roti、Eop、Snx 经常无法下载
+
+ >
+
+
+
+### 7、出现异常情况时的解决方法
+
+
+
+
+
+
+
+## 二、GAMP-GOOD 源码解析
+
+### 1、程序概述
+
+* **Libgood:程序核心代码库**
+ * **时间转换函数 (TimeUtil.cpp)**:定义时间结构体gtime_t{int mjd; double sod}作为中间媒介进行时间转换和传递,一般无需改动;
+ * **字符串操作函数 (StringUtil.cpp)**:字符串截取、转换等操作,一般无需改动;
+ * **配置文件读写函数 (PreProcess.cpp)**:全局控制变量 fopt_t/popt_t、FTP下载选项的初始化,配置文件读取和输出等;
+ * **日志输出模块 (logger.h)**:;
+ * **数据下载核心模块 (FtpUtil.cpp)** :其它为相应的子程序实现不同GNSS数据下载;
+* **Good_cui:命令行可执行程序**
+ * 导入 YAML 配置文件到 fopt、popt 结构体;
+ * 调用 FtpUtil::FtpDownload 根据配置下载数据;
+* **Good_gui:Qt界面可执行程序**
+ * 在界面上进行配置,
+
+
+
+### 2、文件结构
+
+
+
+
+
+### 3、CmakeList.txt
+
+
+
+
+
+### 4、第三方命令行工具
+
+
+
+#### 1. wget 数据下载
+
+> 官网:https://www.gnu.org/software/wget/
+
+`wget` 是一个在命令行环境下工作的免费网络工具,用于从网络上下载文件。它支持 HTTP、HTTPS 和 FTP 协议,并且能够递归下载,即下载整个网站或目录结构。常用命令如下:
+
+* 下载单个文件:
+* 递归下载整个目录:
+
+
+
+#### 2. gzip 解压 gz 文件
+
+> 官网:https://www.gzip.org/
+
+`gzip` 是一个广泛使用的文件压缩工具,它使用 DEFLATE 算法来压缩文件,以减小文件的大小。`gzip` 通常用于 Unix 和 Linux 系统,但它也可以在其他操作系统上使用。压缩后的文件通常具有 `.gz` 或者 `.z` 扩展名。常用命令如下:
+
+```cpp
+- 压缩单个文件 : gzip
+
+
+
+#### 8. Geoscience Australia
\ No newline at end of file
diff --git "a/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/Determination of differential code biases with multi-GNSS observations.pdf" "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/Determination of differential code biases with multi-GNSS observations.pdf"
new file mode 100644
index 0000000..a8f9f22
Binary files /dev/null and "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/Determination of differential code biases with multi-GNSS observations.pdf" differ
diff --git "a/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md" "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md"
new file mode 100644
index 0000000..67b5041
--- /dev/null
+++ "b/03-GAMP-GOOD \345\217\212 GNSS \346\225\260\346\215\256\344\270\213\350\275\275/GAMP-GOOD \345\277\253\351\200\237\344\270\212\346\211\213\345\222\214\346\272\220\347\240\201\350\247\243\346\236\220.md"
@@ -0,0 +1,499 @@
+
+
+
+[TOC]
+
+## 一、GAMP-GOOD 快速上手
+
+GAMP-GOOD 由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt界面可执行程序 Good_Gui 三部分组成,自2021年4月1.0版本至今已历经 15 个版本迭代,目前已实现常用 GNSS 观测值、广播星历、精密卫星轨道和钟差(实时、超快、快速、最终)、地球定向参数、卫星姿态ORBEX、DCB/DSB/OSB、SINEX周解、电离层和对流层延迟产品、天线相位中心等产品下载。
+
+| 数据类型 | 用处 |
+| :--------------------------------------: | :---------------------------------------: |
+| IGS观测数据 (RINEX 2.xx, 短文件名) | 多用于GPS定轨、估钟、PPP算法验证等 |
+| MGEX观测数据 (RINEX 3.xx, 长文件名) | 多用于多系统GNSS定轨、估钟、PPP算法验证等 |
+| 科廷科技大学短基线 CORS 观测值 | 多用于短基线RTK算法验证 |
+| 澳大利亚地球科学局 (GA) 观测值 | 多用于BDS-2/3 UPD估计、PPP算法验证等 |
+| 香港CORS观测值(RINEX 3.xx, 长文件名) | 多用于海潮、GNSS水汽、电离层延迟建模等 |
+| 广播星历 (yyg/yyn/yyp 等) | 多用于SPP、RTK解算中的卫星坐标与钟差计算 |
+| IGS 与 MGEX 各分析中心精密轨道和钟差产品 | 多用于PPP解算中的卫星轨道和钟差计算 |
+| 地球自转参数 | 多用于计算极潮改正 |
+| IGS SINEX周解/天解 | 多用作定位算法验证的参考坐标 |
+| CODE或MGEX差分码偏差 | 多用于改正伪距硬件延迟 |
+| 全球电离层图 (GIM) | 全球电离层延迟产品 |
+| 全球电离层闪烁 (ROTI) | 多用于电离层不规则体和闪烁研究 |
+| CNES离线实时轨道/钟差/相位小数偏差产品 | 用于实时PPP算法验证、实时PPP模糊度固定等 |
+| IGS天线相位中心改正 (ANTEX) | 用于卫星和接收机天线相位中心改正 |
+
+### 1、Good-Gui:Qt 界面数据下载程序
+
+
+
+
+
+
+
+
+
+### 2、Good-Cui:命令行数据下载程序
+
+
+
+
+
+
+
+
+
+### 3、YAML 格式配置文件说明
+
+YAML(YAML Ain't Markup Language)是一种轻量级的数据序列化格式,可以用于配置文件、数据交换、API 请求等多种场景。它是一种简单易用的数据序列化格式,使得数据可以以人类易读的方式进行存储和传输。语法非常简单,使用缩进和符号来表示数据结构,需要注意以下激光问题:
+
+> 1. 大小写敏感;
+> 2. 缩进不允许使用 Tab,只允许空格;
+> 3. 缩进的空格数不重要,只要相同层级的元素左对齐即可;
+> 4. 键和冒号之间无空格,冒号和值之间要加空格;
+> 5. `#` 后面是注释;
+
+配置文件以 **数组 + 键值对** 的方式组织,每一个键值对都是一个配置项,GAMP-GOOD 配置文件包含以下配置项:
+
+1. 目录:
+
+ > * 各类数据下载的子目录(Obs/Nav/Orb等)都继承自主目录(填相对路径);
+ > * wget/gzip/crx2rnx 的目录以及 Obs/Nav/Trop 测站列表文件可以继承自主目录(填相对路径),也可以独立于主目录之外(填绝对路径)。
+
+2. `procTime`:数据下载的开始时间,支持三种形式:
+
+ ```cpp
+ - 1 年/月/日 : 1 2024 8 3
+ - 2 年/年积日 : 2 2024 216
+ - 3 GPS周/周内天 : 3 2327 7
+ ```
+
+3. `minusAdd1day`:【0 : 关、1 : 开】选择是否额外下载前一天和后一天的精密星历和精密钟差。
+
+ > 部分 PPP 程序需要用到前天和后一天的精密星历和精密钟差进行插值。
+
+4. `merge_sp3files`:【0 : 关、1 : 开】选择是否合并下载的三天精密星历和钟差。
+
+ > 仅在 minusAdd1day 开启的时候生效。
+
+5. `printInfoWget`:【0 : 关、1 : 开】选择是否在终端显示 Wegt 输出的信息。
+
+ > Qt 界面程序中无效。
+
+6. `ftpDownloading`:
+
+ 1. `opt4ftp`:【0 : 关、1 : 开】数据下载的总开关。
+
+ 2. `ftpArch`:【cddis、ign、whu】选择主要的数据中心,支持 cddis、ign、whu:
+
+ ```cpp
+ - 美国 cddis : ftps://gdc.cddis.eosdis.nasa.gov/pub/
+ - 法国 ign : ftp://igs.ign.fr/pub/
+ - 中国 whu : ftp://igs.gnsswhu.cn/pub/
+ ```
+
+ > * 绝大多数的数据都在选择的数据中心里下载,有部分例外,详见 [GAMP-GOOD 支持下载的产品链接.md](GAMP-GOOD 支持下载的产品链接.md)。
+ > * 一般来说美国的 cddis 数据最全,国内用 whu 下载数据最快。
+
+7. `getObs`:
+
+ 1. `opt4obs`:【0 : 关、1 : 开】观测数据下载的总开关。
+ 2. `obsType`:选择观测数据下载的种类
+ 3. `obsFrom`:
+ 4. `obsList`:
+ 5. `sHH4obs`:
+ 6. `nHH4obs`:
+ 7. `l2s4obs`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+8. `getNav`:
+ 1. `opt4nav`:【0 : 关、1 : 开】
+ 2. `navType`:
+ 3. `navSys`:
+ 4. `navFrom`:
+ 5. `navList`:
+ 6. `sHH4nav`:
+ 7. `nHH4nav`:
+ 8. `l2s4nav`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+9. `getOrbClk`:
+ 1. `opt4oc`:【0 : 关、1 : 开】
+ 2. `ocFrom`:
+ 3. `sHH4oc`:
+ 4. `nHH4oc`:
+ 5. `l2s4oc`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+10. `getEop`:
+
+ 11. `opt4eop`:【0 : 关、1 : 开】
+
+ 12. `eopFrom`:
+
+ 13. `sHH4eop`:
+
+ 14. `nHH4eop`:
+
+ 15. `l2s4eop`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+16. `getObx`:
+ 1. `opt4obx`:【0 : 关、1 : 开】
+ 2. `obxFrom`:
+
+17. `getDsb`:
+
+ 1. `opt4dsb`:【0 : 关、1 : 开】
+ 2. `dsbFrom`:
+
+18. `getOsb`:
+
+ 1. `opt4osb`:【0 : 关、1 : 开】
+ 2. `osbFrom`:
+
+19. `getSnx`:
+ 1. `opt4snx`:【0 : 关、1 : 开】
+ 2. `l2s4snx`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+20. `getIon`:
+ 1. `opt4ion`:
+ 2. `ionFrom`:
+ 3. `l2s4ion`:【0 : 仅长文件名、1 : 仅短文件名、2 : 长文件名 + 短文件名】
+
+21. `getRoti`
+ 1. `opt4rot`:【0 : 关、1 : 开】
+
+22. `getTrp`:
+
+ 1. `opt4trp`:【0 : 关、1 : 开】
+ 2. `trpFrom`:
+ 3. `trpList`:
+ 4. `l2s4trp`:
+
+23. `getAtx`:
+ 1. `opt4atx`:
+
+---
+
+
+
+```yaml
+# The root/main directory of GNSS observations and products -------------------
+mainDir : D:\Projects\proj_VScode\UNIQ\GOOD\dataset_Win
+# The sub-directories of GNSS observations and products, which needs to inherit the path of 'mainDir'
+# i.e., 'orbDir' = 'mainDir' + 'orbDir', which is 'D:\Projects\proj_VScode\UNIQ\GOOD\dataset\orb'
+obsDir : obs # The sub-directory of RINEX format observation files
+navDir : nav # The sub-directory of RINEX format broadcast ephemeris files
+orbDir : orb # The sub-directory of SP3 format precise ephemeris files
+clkDir : clk # The sub-directory of RINEX format precise clock files
+eopDir : eop # The sub-directory of earth rotation/orientation parameter (EOP) files
+obxDir : obx # The sub-directory of MGEX final/rapid and/or CNES real-time ORBEX (ORBit EXchange format) files
+biaDir : bia # The sub-directory of CODE/MGEX differential code/signal bias (DCB/DSB), MGEX observable-specific signal bias (OSB), and/or CNES real-time OSB files
+snxDir : snx # The sub-directory of SINEX format IGS weekly solution files
+ionDir : ion # The sub-directory of CODE/IGS global ionosphere map (GIM) files
+ztdDir : ztd # The sub-directory of CODE/IGS tropospheric product files
+tblDir : tbl # The sub-directory of table files (i.e., ANTEX, ocean tide loading files, etc.) for processing
+logDir : log # The sub-directory of log file
+3partyDir : thirdparty_Win # The sub-directory where third-party softwares (i.e., 'wget', 'gzip', 'crx2rnx' etc) are stored
+
+# Time settings ----------------------------------------------------------------
+procTime : 2 2024 1 1 # The setting of start time for processing, which should be set to '1 year month day ndays' or '2 year doy ndays' or '3 week dow ndays'. NOTE: doy = day of year; week = GPS week; dow = day within week
+
+# Settings of FTP downloading --------------------------------------------------
+minusAdd1day : 1 # (0: off 1: on) The setting of the day before and after the current day for precise satellite orbit and clock products downloading
+merge_sp3files: 1 # (0: off 1: on) to merge three consecutive sp3 files into one file
+printInfoWget : 1 # (0: off 1: on) Printing the information generated by 'wget'
+
+# Handling of FTP downloading --------------------------------------------------
+ftpDownloading: # The setting of the master switch for data downloading
+ opt4ftp: 1 # 1st: (0:off 1:on);
+ ftpArch: whu # 2nd: the FTP archive, i.e., cddis, ign, or whu.
+getObs: # GNSS observation data downloading option
+ opt4obs: 0 # 1st(opt4obs): (0: off 1: on);
+ obsType: daily # 2nd(obsType): 'daily', 'hourly', 'highrate', '30s', '5s', or '1s';
+ obsFrom: mgex # 3rd: 'igs', 'mgex', 'igm', 'cut', 'hk', 'ngs', 'epn', 'pbo', or 'chi';
+ obsList: all # 4th: 'all' (observation files downloaded in the whole directory) or the site list file name (observation files downloaded site-by-site according to the site list file, which needs to inherit the path of 'mainDir');
+ sHH4obs: 01 # 5th: Start hour (00, 01, 02, ...);
+ nHH4obs: 1 # 6th: The consecutive hours, i.e., '01 3' denotes 01, 02, and 03;
+ l2s4obs: 1 # 7th: Valid only for the observation files with long name, 0: long name, 1: short name, 2: long and short name
+ # NOTE: The 5th and 6th items are valid ONLY when the 2nd item 'hourly', 'highrate', '5s', or '1s' is set.
+ # NOTE: If the 3rd item is 'igs', 'mgex', 'igm', the 2nd item can be 'daily', 'hourly', or 'highrate';
+ # If the 3rd item is 'cut', 'ngs', 'epn', or 'pbo', the 2nd item should be 'daily';
+ # If the 3rd item is 'hk', the 2nd item can be 1) '30s', '5s', or '1s' 2) '30s', '05s', or '01s'. However, '30 s', '5 s', or '1 s' is NOT allowed.
+ # NOTE: If the 3rd item is 'hk' 'ngs', or 'pbo', the 4th item should ONLY be the full path of site list.
+ # INFO: The 2nd item 'igs' is for IGS observation (RINEX version 2.xx, short name 'd');
+ # The 2nd item 'mgex' is for MGEX observation (RINEX version 3.xx, long name 'crx');
+ # The 2nd item 'igm' is for the union of IGS and MGEX (IGS + MGEX, while the priority of MGEX sites is higher) observation with respect to the site name;
+ # The 2nd item 'cut' is for Curtin University of Technology (CUT) observation (RINEX version 3.xx, long name 'crx');
+ # The 2nd item 'hk' is for Hong Kong CORS observation (RINEX version 3.xx, long name 'crx');
+ # The 2nd item 'ngs' is for NGS/NOAA CORS observation (RINEX version 2.xx, short name 'd');
+ # The 2nd item 'epn' is for EUREF Permanent Network (EPN) observation (RINEX version 3.xx, long name 'crx' and RINEX version 2.xx, short name 'd');
+ # The 2nd item 'pbo' is for Plate Boundary Observatory (PBO) observation (RINEX version 3.xx, long name 'crx');
+ # The 2nd item 'chi' is for Centro Sismologico Nacional of Universidad de Chile observation (RINEX version 2.xx, short name "d")
+getNav: # Various broadcast ephemeris downloading option
+ opt4nav: 0 # 1st: (0: off 1: on);
+ navType: daily # 2nd: 'daily' or 'hourly';
+ navSys : mixed3 # 3rd: 'gps', 'glo', 'bds', 'gal', 'qzs', 'irn', 'mixed3', 'mixed4', or 'all';
+ navFrom: igs # 4th: Analysis center (i.e., 'igs', 'dlr', 'ign', 'gop', or 'wrd') that carries out the combination of broadcast ephemeris for mixed navigation data. From CDDIS or WHU FTP, 'igs' and 'dlr' can be downloaded, and from IGN, 'igs' and 'ign' can be downloaded. The downloading of 'gop' and/or 'wrd' is via the other FTP addresses;
+ navList: site_mgex.list # 5th: ONLY the site list file name is valid if the 2nd item is 'hourly';
+ sHH4nav: 01 # 6th: Start hour (00, 01, 02, ...);
+ nHH4nav: 2 # 7th: The consecutive hours, i.e., '01 3' denotes 01, 02, and 03;
+ l2s4nav: 2 # 8th: Valid only for the navigation files with long name, 0: long name, 1: short name, 2: long and short name
+ # NOTE: The 5th, 6th, and 7th items are valid ONLY when the 2nd item 'hourly' is set.
+ # NOTE: If the 2nd item is 'daily', the 3rd item should be 'gps', 'glo', 'mixed3', or 'mixed4';
+ # If the 2nd item is 'hourly', the 3rd item can be 'gps', 'glo', 'bds', 'gal', 'qzs', 'irn', 'mixed', or 'all'.
+ # NOTE: The 4th item is valid ONLY when the 3rd item 'mixed3' is set.
+ # NOTE: The 3rd item 'mixed3' is for RINEX 3.xx, while 'mixed4' is for RINEX 4.xx.
+getOrbClk: # Satellite final/rapid/ultra-rapid precise orbit and clock downloading option
+ opt4oc : 1 # 1st: (0: off 1: on);
+ ocFrom : igs+gfz_m # 2nd: Analysis center (i.e., IGS final: 'cod', 'emr', 'esa', 'gfz', 'grg', 'igs', 'jgx', 'jpl', 'mit', 'all', 'cod+igs', 'cod+gfz+igs', ...; MGEX final: 'cod_m', 'gfz_m', 'grg_m', 'iac_m', 'jax_m', 'sha_m', 'whu_m', 'all_m', 'cod_m+gfz_m', 'grg_m+whu_m', ...; rapid: 'cod_r', 'emr_r', 'esa_r', 'gfz_r', 'igs_r'; ultra-rapid: 'esa_u', 'gfz_u', 'igs_u', 'whu_u'; real-time: 'cnt'). NOTE: The option of 'cnt' is for real-time precise orbit and clock products from CNES offline files;
+ sHH4oc : 01 # 3rd: Start hour (00, 06, 12, or 18 for esa_u and igs_u; 00, 03, 06, ... for gfz_u; 01, 02, 03, ... for whu_u).
+ nHH4oc : 2 # 4th: The consecutive sessions, i.e., '00 3' denotes 00, 06, and 12 for esa_u and/or igs_u, 00, 03, and 06 for gfz_u, while 00, 01, and 02 for whu_u.
+ l2s4oc : 2 # 5th: Valid only for the precise orbit and clock files with long name, 0: long name, 1: short name, 2: long and short name
+getEop: # Earth rotation/orientation parameter (ERP/EOP) downloading option
+ opt4eop: 0 # 1st: (0: off 1: on);
+ eopFrom: igs # 2nd: Analysis center (i.e., final: 'cod', 'emr', 'esa', 'gfz', 'grg', 'igs', 'jgx', 'jpl', 'mit'; ultra-rapid: 'esa_u', 'gfz_u', 'igs_u').
+ sHH4eop: 01 # 3rd: Valid ONLY when the 2nd item 'esa_u', 'gfz_u', or 'igs_u' is set.
+ nHH4eop: 4 # 4th: Valid ONLY when the 2nd item 'esa_u', 'gfz_u', or 'igs_u' is set.
+ l2s4eop: 2 # 5th: Valid only for EOP file with long name, 0: long name, 1: short name, 2: long and short name
+getObx: # ORBEX (ORBit EXchange format) for satellite attitude information downloading option
+ opt4obx: 0 # 1st: (0: off 1: on);
+ obxFrom: all # 2nd: Analysis center (i.e., final/rapid: 'cod', 'gfz', 'grg', 'whu', 'all'; real-time: 'cnt'). NOTE: The option of 'cnt' is for real-time ORBEX from CNES offline files.
+getDsb: # Differential code/signal bias (DCB/DSB) downloading option
+ opt4dsb: 0 # 1st: (0: off 1: on);
+ dsbFrom: all # 2nd: Analysis center (i.e., 'cod', 'cas', 'all'). NOTE: DCBs from CODE are for GPS and GLONASS, while DSBs from CAS are for multiple GNSS.
+getOsb: # Observable-specific signal bias (OSB) downloading option
+ opt4osb: 0 # 1st: (0: off 1: on);
+ osbFrom: cas # 2nd: Analysis center (i.e., final/rapid: 'cas', 'cod', 'gfz', 'grg', 'whu', 'all'; real-time: 'cnt'). NOTE: The option of 'cnt' is for real-time OSBs from CNES offline files.
+getSnx: # IGS weekly SINEX downloading option
+ opt4snx: 0 # 1st: (0: off 1: on)
+ l2s4snx: 2 # 2nd: Valid only for IGS weekly SINEX file with long name, 0: long name, 1: short name, 2: long and short name
+getIon: # Global ionosphere map (GIM) downloading option
+ opt4ion: 0 # 1st: (0: off 1: on);
+ ionFrom: cod # 2nd: Analysis center (i.e., final: 'cas', 'cod', 'emr', 'esa', 'igs', 'jpl', 'upc', 'all', 'cas+cod', 'cas+cod+igs', ...;)
+ l2s4ion: 2 # 3rd: Valid only for the ionosphere files with long name, 0: long name, 1: short name, 2: long and short name
+getRoti: # Rate of TEC index (ROTI) downloading option
+ opt4rot: 0 # (0: off 1: on)
+getTrp: # CODE/IGS tropospheric product downloading option
+ opt4trp: 0 # 1st: (0:off 1:on);
+ trpFrom: cod # 2nd: Analysis center (i.e., 'igs' or 'cod');
+ trpList: site_trp.list # 3rd: the file name of site.list. NOTE: It is valid ONLY when the 2nd item 'igs' is set.
+ l2s4trp: 2 # 4th: Valid only for the troposphere files with long name, 0: long name, 1: short name, 2: long and short name
+getAtx: # ANTEX format antenna phase center correction downloading option
+ opt4atx: 0 # (0:off 1:on)
+```
+
+
+
+
+
+
+
+### 4、GA 数据下载脚本使用
+
+
+
+
+
+
+
+### 5、GAMP-GOOD 不支持下载的数据
+
+1. 潮汐文件:
+
+ >
+
+2. 武汉大学李星星老师团队的 UPD 文件
+
+ >
+
+3. GAMIT、PANDA、Bernese 表文件
+
+ >
+
+4.
+
+
+
+### 6、已知存在的问题
+
+1. 无法下载快速/超快速的精密星历、精密钟差、电离层产品
+
+ > 代码暂未实现,将在后续版本更新。
+
+2. 部分小时广播星历下载存在问题
+
+ >
+
+3. 部分 IGS 测站无法下载对流层数据
+
+ > 服务器上没有这些测站的数据。
+
+4. ATX 和 DCB 文件有时候下载很慢
+
+ > * Atx
+
+4. whu 和 grg 的
+
+ >
+
+5. Roti、Eop、Snx 经常无法下载
+
+ >
+
+
+
+### 7、出现异常情况时的解决方法
+
+
+
+
+
+
+
+## 二、GAMP-GOOD 源码解析
+
+### 1、程序概述
+
+* **Libgood:程序核心代码库**
+ * **时间转换函数 (TimeUtil.cpp)**:定义时间结构体gtime_t{int mjd; double sod}作为中间媒介进行时间转换和传递,一般无需改动;
+ * **字符串操作函数 (StringUtil.cpp)**:字符串截取、转换等操作,一般无需改动;
+ * **配置文件读写函数 (PreProcess.cpp)**:全局控制变量 fopt_t/popt_t、FTP下载选项的初始化,配置文件读取和输出等;
+ * **日志输出模块 (logger.h)**:;
+ * **数据下载核心模块 (FtpUtil.cpp)** :其它为相应的子程序实现不同GNSS数据下载;
+* **Good_cui:命令行可执行程序**
+ * 导入 YAML 配置文件到 fopt、popt 结构体;
+ * 调用 FtpUtil::FtpDownload 根据配置下载数据;
+* **Good_gui:Qt界面可执行程序**
+ * 在界面上进行配置,
+
+
+
+### 2、文件结构
+
+
+
+
+
+### 3、CmakeList.txt
+
+
+
+
+
+### 4、第三方命令行工具
+
+
+
+#### 1. wget 数据下载
+
+> 官网:https://www.gnu.org/software/wget/
+
+`wget` 是一个在命令行环境下工作的免费网络工具,用于从网络上下载文件。它支持 HTTP、HTTPS 和 FTP 协议,并且能够递归下载,即下载整个网站或目录结构。常用命令如下:
+
+* 下载单个文件:
+* 递归下载整个目录:
+
+
+
+#### 2. gzip 解压 gz 文件
+
+> 官网:https://www.gzip.org/
+
+`gzip` 是一个广泛使用的文件压缩工具,它使用 DEFLATE 算法来压缩文件,以减小文件的大小。`gzip` 通常用于 Unix 和 Linux 系统,但它也可以在其他操作系统上使用。压缩后的文件通常具有 `.gz` 或者 `.z` 扩展名。常用命令如下:
+
+```cpp
+- 压缩单个文件 : gzip 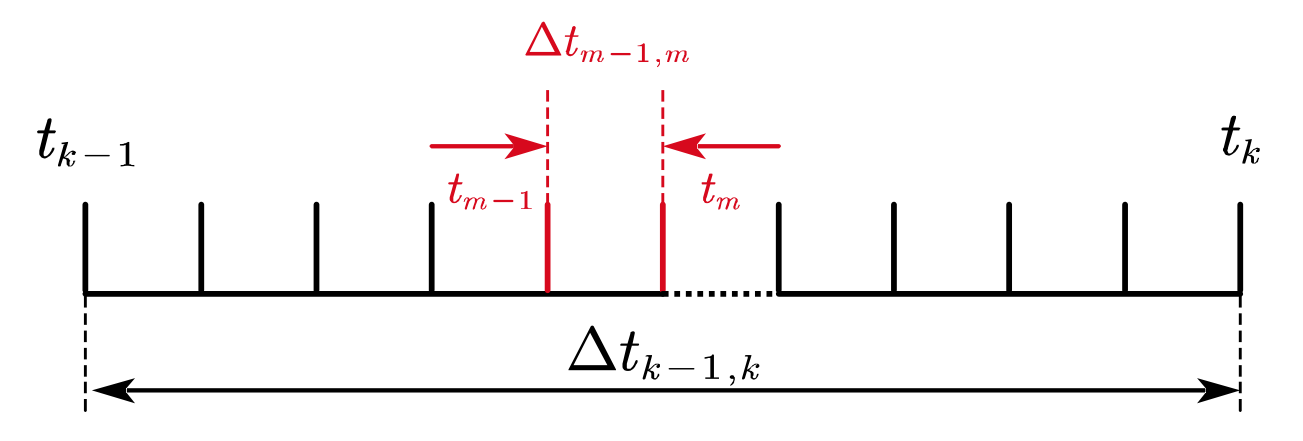 -
-考虑到上述的运动学模型,推导出 IMU 运动积分的计算公式如下:
-$$
-\begin{aligned} \mathbf{q}_{\mathrm{b}_{m}}^{\mathrm{w}} & =\mathbf{q}_{\mathrm{w}_{\mathrm{i}(m-1)}}^{\mathrm{w}}\left(t_{m}\right) \otimes \mathbf{q}_{\mathrm{b}_{\mathrm{i}(m-1)}}^{\mathrm{w}_{\mathrm{i}(m-1)}} \otimes \mathbf{q}_{\mathrm{b}_{m}}^{\mathrm{b}_{(m-1)}} \\ \boldsymbol{v}_{\mathrm{wb}_{m}}^{\mathrm{w}} & =\boldsymbol{v}_{\mathrm{wb}_{m-1}}^{\mathrm{w}}+\int_{t_{m-1}}^{t_{m}} \mathbf{R}_{\mathrm{w}_{\mathrm{i}(m-1)}}^{\mathrm{w}}(t) \mathbf{R}_{\mathrm{b}_{\mathrm{i}(m-1)}}^{\mathrm{w}_{\mathrm{i}(m-1)}} \mathbf{R}_{\mathrm{b}_{t}}^{\mathrm{b}_{\mathrm{i}(m-1)}} \boldsymbol{f}^{b} d t \\ & +\int_{t_{m-1}}^{t_{m}}\left(\boldsymbol{g}^{\mathrm{w}}-2 \boldsymbol{w}_{\mathrm{ie}}^{\mathrm{w}} \times \boldsymbol{v}_{\mathrm{wb}_{t}}^{\mathrm{w}}\right) d t \\ \boldsymbol{p}_{\mathrm{wb}_{m}}^{\mathrm{w}} & =\boldsymbol{p}_{\mathrm{wb}_{m-1}}^{\mathrm{w}}+\int_{t_{m-1}}^{t_{m}} \boldsymbol{v}_{\mathrm{wb}_{t}}^{\mathrm{w}} d t\end{aligned}
-$$
-其中,下标 $m$ 和 $m-1$ 表示 $t_{m}$ 和 $t_{m-1}$ 时刻,下标 $\mathrm{w}_{\mathrm{i}(\mathrm{m}-1)}$ 表示上一时刻 $w$ 系相对于 $i$ 系的旋转,下标 $\mathrm{b}_{i(m-1)}$ 表示上一时刻 $b$ 系相对于 $i$ 系的旋转,$\mathbf{q}_{\mathrm{b}_{(-m-1)}}^{w_{i(m-1)}}=\mathbf{q}_{\mathrm{b}_{m-1}}^{\mathrm{w}}$ 表示 $b$ 系相对于 $w$ 系的旋转,公式可改写为:
-$$
-\begin{array}{l}
-\mathbf{q}_{b_{m}}^{w}=\mathbf{q}_{w_{1(m-1)}}^{w^{}}\left(t_{m}\right) \otimes \mathbf{q}_{b_{i}(m-1)}^{w_{i(m-1)}} \otimes \mathbf{q}_{b_{m}}^{b_{i}(m-1)}, \\
-\boldsymbol{v}_{\mathrm{wb}_{m}}^{\mathrm{w}}=\boldsymbol{v}_{w \mathrm{~b}_{m-1}}^{\mathrm{w}}+\frac{1}{2}\left[\mathbf{R}_{w_{(,(m-1)}}^{\mathrm{w}}\left(t_{m}\right)+\mathbf{I}\right] \mathbf{R}_{\mathrm{b}_{(-,-1)}}^{w_{(i,-1)}} \Delta \boldsymbol{v}_{f, m}^{\mathrm{b}} \\
-+\left(\boldsymbol{g}^{w}-2 \boldsymbol{w}_{k}^{w} \times \boldsymbol{v}_{w b_{m-1}}^{w}\right) \Delta t_{m-1, m}, \\
-p_{w_{b}}^{\mathrm{w}}=p_{\mathrm{wb}_{m-1}}^{\mathrm{w}}+\frac{1}{2}\left(\boldsymbol{v}_{\mathrm{wb}_{m-1}}^{\mathrm{w}}+\boldsymbol{v}_{\mathrm{wb}_{m}}^{\mathrm{w}}\right) \Delta t_{m-1, m}, \\
-\end{array}
-$$
-其中,$b$ 系旋转矢量 $\mathbf{q}_{b_{m}}^{b_{i(m-1)}}$ 对应增量 $\Delta \boldsymbol{\theta}_{m}$,可以采用双子样算法,进一步提高运动积分的精度 ^[1]-[3]^。四元数 $\mathbf{q}_{w_{i(m-1)}}^{\mathrm{w}}\left(t_{m}\right)$ 或者旋转矩阵 $\mathbf{R}_{w_{(m-1)}}^{w}\left(t_{m}\right)$ 是由地球自转引起的,其自转矢量可表示为:
-$$
-\phi_{w_{i j-1 i}}^{w}\left(t_{m}\right)=-w_{i e}^{w} \Delta t_{m-1, m} .
-$$
-
-### 3、IMU 预积分
-
-
-
-
-
-
-
-
-
-## 三、基于因子图优化的 GNSS/INS 组合导航
-
-
-
-
-
-
-
-## 四、实验及结果
-
-
-
-
-
-
-
-## 五、结论
-
-
-
-
-
-
-
-
-
-## 参考文献
-
-1. P. G. Savage, “Strapdown Inertial Navigation Integration Algorithm Design Part 1: Attitude Algorithms,” *J. Guid. Control Dyn.*, vol. 21, no. 1, pp. 19–28, 1998.
-
-2. P. G. Savage, “Strapdown Inertial Navigation Integration Algorithm Design Part 2: Velocity and Position Algorithms,” *J. Guid. Control Dyn.*, vol. 21, no. 2, pp. 208–221, 1998.
-
-3. P. D. Groves, *Principles of GNSS, inertial, and multisensor integrated* *navigation systems*. Boston: Artech House, 2008.
-
-4. C. Shen *et al.*, “Seamless GPS/Inertial Navigation System Based on Self-Learning Square-Root Cubature Kalman Filter,” *IEEE Trans. Ind.* *Electron.*, vol. 68, no. 1, pp. 499–508, 2021.
-
-5. B. Gao, G. Hu, Y. Zhong, and X. Zhu, “Cubature Kalman Filter With Both Adaptability and Robustness for Tightly-Coupled GNSS/INS Integration,” *IEEE Sens. J.*, vol. 21, no. 13, pp. 14997–15011, Jul. 2021.
-
-6. Q. Zhang, X. Niu, H. Zhang, and C. Shi, “Algorithm Improvement of the Low-End GNSS/INS Systems for Land Vehicles Navigation,” *Math.* *Probl. Eng.*, vol. 2013, pp. 1–12, 2013.
-
-7. X. Niu, H. Zhang, C. Shi, K.-W. Chiang, and N. El-Sheimy, “A proposed evaluation standard for the navigation results of MEMS INS/GPS integrated systems,” in *Proceedings of the International Symposium on* *GPS/GNSS*, 2010, pp. 1–5.
-
-8. C. Cadena *et al.*, “Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age,” *IEEE Trans. Robot.*, vol. 32, no. 6, pp. 1309–1332, Dec. 2016.
-
-9. G. Huang, “Visual-Inertial Navigation: A Concise Review,” in *2019* *International Conference on Robotics and Automation (ICRA)*, May 2019, pp. 9572–9582.
-
-10. D. Rouzaud and J. Skaloud, “Rigorous Integration of Inertial Navigation with Optical Sensors by Dynamic Networks,” *Navigation*, vol. 58, no. 2, pp. 141–152, Jun. 2011.
-
-11. D. A. Cucci, M. Rehak, and J. Skaloud, “Bundle adjustment with raw inertial observations in UAV applications,” *ISPRS J. Photogramm.* *Remote Sens.*, vol. 130, pp. 1–12, Aug. 2017.
-
-12. D. A. Cucci and J. Skaloud, “ON RAW INERTIAL MEASUREMENTS IN DYNAMIC NETWORKS,” *ISPRS Ann. Photogramm. Remote Sens.* *Spat. Inf. Sci.*, vol. IV-2/W5, pp. 549–557, May 2019.
-
-13. W. Wen, T. Pfeifer, X. Bai, and L.-T. Hsu, “Factor graph optimization for GNSS/INS integration: A comparison with the extended Kalman filter,” *NAVIGATION*, vol. 68, no. 2, pp. 315–331, 2021.
-
-14. S. Zhao, Y. Chen, and J. A. Farrell, “High-Precision Vehicle Navigation in Urban Environments Using an MEM’s IMU and Single-Frequency GPS Receiver,” *IEEE Trans. Intell. Transp. Syst.*, vol. 17, no. 10, pp. 2854–2867, Oct. 2016.
-
-15. K. Eckenhoff, P. Geneva, and G. Huang, “Closed-form preintegration methods for graph-based visual–inertial navigation,” *Int. J. Robot. Res.*, vol. 38, no. 5, pp. 563–586, Apr. 2019.
-
-16. W. Wen, X. Bai, Y. C. Kan, and L.-T. Hsu, “Tightly Coupled GNSS/INS Integration via Factor Graph and Aided by Fish-Eye Camera,” *IEEE* *Trans. Veh. Technol.*, vol. 68, no. 11, pp. 10651–10662, Nov. 2019.
-
-17. T. Lupton and S. Sukkarieh, “Visual-Inertial-Aided Navigation for High-Dynamic Motion in Built Environments Without Initial Conditions,” *IEEE Trans. Robot.*, vol. 28, no. 1, pp. 61–76, Feb. 2012.
-
-18. C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-Manifold Preintegration for Real-Time Visual--Inertial Odometry,” *IEEE Trans.* *Robot.*, vol. 33, no. 1, pp. 1–21, Feb. 2017.
-
-19. A. Barrau and S. Bonnabel, “A Mathematical Framework for IMU Error Propagation with Applications to Preintegration,” in *2020 IEEE* *International Conference on Robotics and Automation (ICRA)*, May 2020, pp. 5732–5738.
-
-20. M. Brossard, A. Barrau, P. Chauchat, and S. Bonnabel, “Associating Uncertainty to Extended Poses for on Lie Group IMU Preintegration With Rotating Earth,” *IEEE Trans. Robot.*, pp. 1–18, 2021.
-
-21. Y. Luo, C. Guo, and J. Liu, “Equivariant filtering framework for inertial-integrated navigation,” *Satell. Navig.*, vol. 2, no. 1, p. 30, Dec. 2021
-
-22. S. Shen, N. Michael, and V. Kumar, “Tightly-coupled monocular visual-inertial fusion for autonomous flight of rotorcraft MAVs,” in *2015* IEEE International Conference on Robotics and Automation (ICRA)*, May 2015, pp. 5303–5310.
-
-23. T. Qin, P. Li, and S. Shen, “VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator,” *IEEE Trans. Robot.*, vol. 34, no. 4, pp. 1004–1020, Aug. 2018.
-
-24. J. Jiang, X. Niu, and J. Liu, “Improved IMU Preintegration with Gravity Change and Earth Rotation for Optimization-Based GNSS/VINS,” *Remote Sens.*, vol. 12, no. 18, Art. no. 18, Jan. 2020.
-
-25. L. Chang, X. Niu, and T. Liu, “GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration,” *Sensors*, vol. 20, no. 17, p. 4702, Aug. 2020.
-
-26. S. Bai, J. Lai, P. Lyu, Y. Cen, and B. Ji, “Improved Preintegration Method for GNSS/IMU/In-Vehicle Sensors Navigation using Graph Optimization,” *IEEE Trans. Veh. Technol.*, pp. 1–1, 2021.
-
-27. J. Henawy, Z. Li, W.-Y. Yau, and G. Seet, “Accurate IMU Factor Using
-
- Switched Linear Systems for VIO,” *IEEE Trans. Ind. Electron.*, vol. 68,
-
- no. 8, pp. 7199–7208, Aug. 2021.
-
-28. L. Wang, H. Tang, T. Zhang, Q. Chen, J. Shi, and X. Niu, “Improving the Navigation Performance of the MEMS IMU Array by Precise Calibration,” *IEEE Sens. J.*, vol. 21, no. 22, pp. 26050–26058, 2021.
-
-29. H. Tang, X. Niu, T. Zhang, Y. Li, and J. Liu, “OdoNet: Untethered Speed Aiding for Vehicle Navigation Without Hardware Wheeled Odometer,” *IEEE Sens. J.*, vol. 22, no. 12, pp. 12197–12208, Jun. 2022.
-
-30. Agarwal, Sameer, Mierle, and Keir, “Ceres Solver — A Large Scale Non-linear Optimization Library.” [Online]. Avaliable: http://ceres-solver.org/
-
-31. J. Engel, V. Koltun, and D. Cremers, “Direct Sparse Odometry,” *IEEE* *Trans. Pattern Anal. Mach. Intell.*, vol. 40, no. 3, pp. 611–625, Mar. 2018
-
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM \345\273\266\344\274\270.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM \345\273\266\344\274\270.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM \345\273\266\344\274\270.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM \345\273\266\344\274\270.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM3\345\237\272\347\241\200\347\237\245\350\257\206\347\202\271.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM3\345\237\272\347\241\200\347\237\245\350\257\206\347\202\271.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM3\345\237\272\347\241\200\347\237\245\350\257\206\347\202\271.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM3\345\237\272\347\241\200\347\237\245\350\257\206\347\202\271.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/01-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\277\220\350\241\214\343\200\201\344\270\273\350\246\201\346\211\247\350\241\214\346\265\201\347\250\213.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/01-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\277\220\350\241\214\343\200\201\344\270\273\350\246\201\346\211\247\350\241\214\346\265\201\347\250\213.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/01-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\277\220\350\241\214\343\200\201\344\270\273\350\246\201\346\211\247\350\241\214\346\265\201\347\250\213.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/01-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\277\220\350\241\214\343\200\201\344\270\273\350\246\201\346\211\247\350\241\214\346\265\201\347\250\213.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/02-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211Tracking \347\272\277\347\250\213.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/02-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211Tracking \347\272\277\347\250\213.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/02-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211Tracking \347\272\277\347\250\213.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/02-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211Tracking \347\272\277\347\250\213.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/03-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\211\357\274\211LocalMapping \347\272\277\347\250\213.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/03-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\211\357\274\211LocalMapping \347\272\277\347\250\213.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/03-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\211\357\274\211LocalMapping \347\272\277\347\250\213.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/03-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\211\357\274\211LocalMapping \347\272\277\347\250\213.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/04-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\345\233\233\357\274\211Loop&Merging \347\272\277\347\250\213.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/04-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\345\233\233\357\274\211Loop&Merging \347\272\277\347\250\213.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/04-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\345\233\233\357\274\211Loop&Merging \347\272\277\347\250\213.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/04-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\345\233\233\357\274\211Loop&Merging \347\272\277\347\250\213.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Bags of Binary Words for Fast Place Recognition in Image Sequences.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Bags of Binary Words for Fast Place Recognition in Image Sequences.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Bags of Binary Words for Fast Place Recognition in Image Sequences.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Bags of Binary Words for Fast Place Recognition in Image Sequences.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Calibration_Tutorial.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Calibration_Tutorial.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Calibration_Tutorial.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Calibration_Tutorial.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Inertial-Only Optimization for Visual-Inertial Initialization.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Inertial-Only Optimization for Visual-Inertial Initialization.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Inertial-Only Optimization for Visual-Inertial Initialization.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Inertial-Only Optimization for Visual-Inertial Initialization.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM-2015-a Versatile and Accurate Monocular SLAM System.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM-2015-a Versatile and Accurate Monocular SLAM System.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM-2015-a Versatile and Accurate Monocular SLAM System.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM-2015-a Versatile and Accurate Monocular SLAM System.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2 \350\256\272\346\226\207\347\277\273\350\257\221.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2 \350\256\272\346\226\207\347\277\273\350\257\221.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2 \350\256\272\346\226\207\347\277\273\350\257\221.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2 \350\256\272\346\226\207\347\277\273\350\257\221.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2-2016-an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2-2016-an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2-2016-an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2-2016-an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM3 An Accurate Open-Source Library.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM3 An Accurate Open-Source Library.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM3 An Accurate Open-Source Library.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM3 An Accurate Open-Source Library.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\347\263\273\347\273\237\347\211\271\345\276\201\345\210\206\346\236\220\347\240\224\347\251\266_\350\226\233\347\221\236.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\347\263\273\347\273\237\347\211\271\345\276\201\345\210\206\346\236\220\347\240\224\347\251\266_\350\226\233\347\221\236.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\347\263\273\347\273\237\347\211\271\345\276\201\345\210\206\346\236\220\347\240\224\347\251\266_\350\226\233\347\221\236.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\347\263\273\347\273\237\347\211\271\345\276\201\345\210\206\346\236\220\347\240\224\347\251\266_\350\226\233\347\221\236.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\350\257\246\350\247\243_\345\220\264\345\215\232_\346\263\241\346\263\241\346\234\272\345\231\250\344\272\272.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\350\257\246\350\247\243_\345\220\264\345\215\232_\346\263\241\346\263\241\346\234\272\345\231\250\344\272\272.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\350\257\246\350\247\243_\345\220\264\345\215\232_\346\263\241\346\263\241\346\234\272\345\231\250\344\272\272.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\350\257\246\350\247\243_\345\220\264\345\215\232_\346\263\241\346\263\241\346\234\272\345\231\250\344\272\272.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORBSLAM-Atlas\357\274\232a robust and accurate multi-map system.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORBSLAM-Atlas\357\274\232a robust and accurate multi-map system.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORBSLAM-Atlas\357\274\232a robust and accurate multi-map system.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORBSLAM-Atlas\357\274\232a robust and accurate multi-map system.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/PTAM2007-Parallel Tracking and Mapping for Small AR Workspaces-KleinMurray2007ISMAR.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/PTAM2007-Parallel Tracking and Mapping for Small AR Workspaces-KleinMurray2007ISMAR.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/PTAM2007-Parallel Tracking and Mapping for Small AR Workspaces-KleinMurray2007ISMAR.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/PTAM2007-Parallel Tracking and Mapping for Small AR Workspaces-KleinMurray2007ISMAR.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Visual-Inertial Monocular SLAM with Map Reuse.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Visual-Inertial Monocular SLAM with Map Reuse.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Visual-Inertial Monocular SLAM with Map Reuse.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Visual-Inertial Monocular SLAM with Map Reuse.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Atlas \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Atlas \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Atlas \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Atlas \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Frame \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Frame \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Frame \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Frame \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/FrameDrawer \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/FrameDrawer \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/FrameDrawer \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/FrameDrawer \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/G2oTypes.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/G2oTypes.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/G2oTypes.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/G2oTypes.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/IMU \347\261\273\345\236\213.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/IMU \347\261\273\345\236\213.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/IMU \347\261\273\345\236\213.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/IMU \347\261\273\345\236\213.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Initializer \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Initializer \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Initializer \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Initializer \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrame \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrame \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrame \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrame \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrameDatabase \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrameDatabase \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrameDatabase \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrameDatabase \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LocalMapping \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LocalMapping \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LocalMapping \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LocalMapping \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LoopClosing \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LoopClosing \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LoopClosing \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LoopClosing \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MLPnPsolver \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MLPnPsolver \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MLPnPsolver \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MLPnPsolver \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Map \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Map \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Map \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Map \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapDrawer \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapDrawer \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapDrawer \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapDrawer \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapPoint \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapPoint \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapPoint \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapPoint \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/ORB-SLAM3\346\226\207\344\273\266\347\273\223\346\236\204.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/ORB-SLAM3\346\226\207\344\273\266\347\273\223\346\236\204.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/ORB-SLAM3\346\226\207\344\273\266\347\273\223\346\236\204.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/ORB-SLAM3\346\226\207\344\273\266\347\273\223\346\236\204.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/OptimizableTypes \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/OptimizableTypes \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/OptimizableTypes \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/OptimizableTypes \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System\346\236\204\351\200\240\345\207\275\346\225\260.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System\346\236\204\351\200\240\345\207\275\346\225\260.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System\346\236\204\351\200\240\345\207\275\346\225\260.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System\346\236\204\351\200\240\345\207\275\346\225\260.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Tracking \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Tracking \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Tracking \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Tracking \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\227\240\344\272\272\346\234\272\350\247\206\350\247\211SLAM\344\270\216\346\203\257\345\257\274\350\236\215\345\220\210\344\275\215\345\247\277\344\274\260\350\256\241\347\256\227\346\263\225\347\240\224\347\251\266_\351\231\210\346\230\223\346\226\207.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\227\240\344\272\272\346\234\272\350\247\206\350\247\211SLAM\344\270\216\346\203\257\345\257\274\350\236\215\345\220\210\344\275\215\345\247\277\344\274\260\350\256\241\347\256\227\346\263\225\347\240\224\347\251\266_\351\231\210\346\230\223\346\226\207.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\227\240\344\272\272\346\234\272\350\247\206\350\247\211SLAM\344\270\216\346\203\257\345\257\274\350\236\215\345\220\210\344\275\215\345\247\277\344\274\260\350\256\241\347\256\227\346\263\225\347\240\224\347\251\266_\351\231\210\346\230\223\346\226\207.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\227\240\344\272\272\346\234\272\350\247\206\350\247\211SLAM\344\270\216\346\203\257\345\257\274\350\236\215\345\220\210\344\275\215\345\247\277\344\274\260\350\256\241\347\256\227\346\263\225\347\240\224\347\251\266_\351\231\210\346\230\223\346\226\207.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LocalMapping.Run.png" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LocalMapping.Run.png"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LocalMapping.Run.png"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LocalMapping.Run.png"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LoopClosing.run.png" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LoopClosing.run.png"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LoopClosing.run.png"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LoopClosing.run.png"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/Mono_inertial_tum_vi.cc\346\265\201\347\250\213.png" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/Mono_inertial_tum_vi.cc\346\265\201\347\250\213.png"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/Mono_inertial_tum_vi.cc\346\265\201\347\250\213.png"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/Mono_inertial_tum_vi.cc\346\265\201\347\250\213.png"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/tracking.png" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/tracking.png"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/tracking.png"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/tracking.png"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\350\247\206\350\247\211-\346\203\257\346\200\247SLAM\346\226\271\346\263\225\347\240\224\347\251\266\345\217\212\345\205\266\350\257\257\345\267\256\345\210\206\346\236\220_\345\274\240\344\270\264\344\275\220.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\350\247\206\350\247\211-\346\203\257\346\200\247SLAM\346\226\271\346\263\225\347\240\224\347\251\266\345\217\212\345\205\266\350\257\257\345\267\256\345\210\206\346\236\220_\345\274\240\344\270\264\344\275\220.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\350\247\206\350\247\211-\346\203\257\346\200\247SLAM\346\226\271\346\263\225\347\240\224\347\251\266\345\217\212\345\205\266\350\257\257\345\267\256\345\210\206\346\236\220_\345\274\240\344\270\264\344\275\220.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\350\247\206\350\247\211-\346\203\257\346\200\247SLAM\346\226\271\346\263\225\347\240\224\347\251\266\345\217\212\345\205\266\350\257\257\345\267\256\345\210\206\346\236\220_\345\274\240\344\270\264\344\275\220.pdf"
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GPS_BDS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\350\256\276\350\256\241\344\270\216\345\256\236\347\216\260_\351\237\251\350\211\263.pdf" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GPS_BDS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\350\256\276\350\256\241\344\270\216\345\256\236\347\216\260_\351\237\251\350\211\263.pdf"
deleted file mode 100644
index 37a65a7..0000000
Binary files "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GPS_BDS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\350\256\276\350\256\241\344\270\216\345\256\236\347\216\260_\351\237\251\350\211\263.pdf" and /dev/null differ
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\346\211\247\350\241\214\346\265\201\347\250\213\357\274\210\344\273\216startRun\345\274\200\345\247\213\357\274\211.xmind" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\346\211\247\350\241\214\346\265\201\347\250\213\357\274\210\344\273\216startRun\345\274\200\345\247\213\357\274\211.xmind"
deleted file mode 100644
index aedd6a4..0000000
Binary files "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\346\211\247\350\241\214\346\265\201\347\250\213\357\274\210\344\273\216startRun\345\274\200\345\247\213\357\274\211.xmind" and /dev/null differ
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\347\250\213\345\272\217\346\226\207\344\273\266\347\273\223\346\236\204.xmind" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\347\250\213\345\272\217\346\226\207\344\273\266\347\273\223\346\236\204.xmind"
deleted file mode 100644
index fead06a..0000000
Binary files "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\347\250\213\345\272\217\346\226\207\344\273\266\347\273\223\346\236\204.xmind" and /dev/null differ
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\345\210\235\350\257\206.md" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\345\210\235\350\257\206.md"
deleted file mode 100644
index 848ba6e..0000000
--- "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\345\210\235\350\257\206.md"
+++ /dev/null
@@ -1,448 +0,0 @@
-## 一、程序概述
-
-
-
-> * 网址:http://www.gnssbook.cn/book2/index.html
->
-> * 程序下载:http://www.gnssbook.cn/book2/GnssRcvr_V14.rar
->
-> * 实例北斗GPS双模中频数据文件下载:[UTREK210_16369000_70s.DAT](https://pan.baidu.com/s/1EWB0oQxDneNDk9iqExLuqQ),提取码: 829c
-
-
-
-
-
-
-
-### 8、UTREK210_16369000_70s.DAT
-
-示例数据
-
-* UTREK210:本书配套的GPS/北斗双模中频数据采集系统
-* 16369000:采样频率
-* 70s:数据总时长70s
-
-
-
-
-
-## 二、程序使用
-
-
-
-
-
-
-
-## 三、startRun.m
-
-执行流程:
-
-1. `clc;clear all;close all;`:清理工作区
-2. `addpath()`:添加工作路径`gui`、`Acquisition`、`Tracking`、`Navmsg`、`PVT`,之后可调用里面的函数
-3. `global`定义全局变量,这些变量主要用于控制程序执行
-4. 为`buffLSResult`、`buffKFResult`开辟空间,用于存最小二乘解和卡尔曼滤波解
-5. 调用`gnssInit()`,初始化和GNSS接收机相关的全局变量
-6. 调用`main_fig()`,生成主界面
-7. `fopen()`以读的方式打开或创建文件`debug.txt`
-8. 为`sigBuff`开辟空间,
-9.
-
-
-
-
-
-## 五、gnssInit():初始化
-
-执行流程:
-
-1. `global`定义**全局变量**
-2. 为一些**全局变量**开辟空间、赋初值
-3. 调用`createValueMapping()`,产生**电平转换和串并转换的查找表**`sampleValueTable`
-4. 调用`ReadGnssConfig()`,获取**配置选项**
-5. 计算**每一次读取中频数据的长度**, 目前默认一次读取50毫秒的中频数据
- *
-6. 初始化**物理常量**(载波频率、光速等)作为`PhyConstant`结构体的成员
-7. 调用`GpsCodeGen()`、`BdCodeGen()`,初始化**伪随机码**`gpsPrnTbl`、`bdPrnTbl`
-8. 对GPS、BDS的**伪随机码**`gpsPrnTbl`、`bdPrnTbl`**重采样**,得到`gpsCode2048`、`bdCode4096`
-9. 初始化GPS和北斗卫星**捕获跟踪状态**结构体`gpsSvStatus`、`bdSvStatus`,成员赋值0
-10. 初始化中频数据**文件句柄**`ifFileHdle`为`-1`
-11. 初始化**正弦、余弦表**`Carrier_I_tbl`、`Carrier_Q_tbl`
-12. 初始化**乘法结果表**`MuxTbl`
-13. 调用`ResetChannel`,初始化24个**跟踪通道**,
-14. 初始化**观测量结构体**`measGnss`
-15. 初始化**本地时间和位置、速度结构体**`localTime`、`localPosvel`、`localPosvelKF`
-16. 初始化**星历参数结构体**`GpsEph`、`BdEph`
-
-```matlab
-function []=gnssInit();
-%% 初始化和GNSS接收机相关的全局变量
-%% 包括物理常量
-
-global gnssConfig;
-global ifFileLength;
-global sampleValueTable;
-global gpsPrnTbl;
-global bdPrnTbl;
-global PhyConstant;
-global ifFileHdle;
-global Carrier_I_tbl;
-global Carrier_Q_tbl;
-global gpsCode2048;
-global bdCode4096;
-global BufferIfLength;
-global gpsSvStatus;
-global bdSvStatus;
-global trackingChannel;
-global measChannel;
-global MuxTbl;
-global halfChipPhaseStep;
-global sysTimeMs;
-global prevSysTimeMs;
-global sampCnt3;
-global Bitmask31;
-global bitmapvalue;
-global ncoNorm;
-global BD_NH_code;
-global GpsEph;
-global BdEph;
-global MeasTicThrd;
-global MeasTicCounter;
-global TakeMeasFlag;
-global measGnss;
-global localPosvel;
-global localTime;
-global kalmanFilter;
-global guidisp;
-global localPosvelKF;
-global Re2t;
-global g_ifdat;
-global b_ifdat;
-
-gpsPrnTbl = zeros(33,1023);
-bdPrnTbl = zeros(33,2046);
-gpsCode2048 = zeros(33,2048);
-bdCode4096 = zeros(33,4096);
-sysTimeMs = 0;
-prevSysTimeMs = 0;
-sampCnt3 = 0;
-ifFileLength = 0;
-Bitmask31 = 2^31 -1;
-guidisp = 1; %显示GUI界面
-Re2t = zeros(3,3);
-bitmapvalue=[1 3 -1 -3];
-cdvalue =[-1 1];
-BD_NH_code = [1 1 1 1 1 -1 1 1 -1 -1 1 -1 1 -1 1 1 -1 -1 -1 1];
-
-%% 产生采样值电平转换表
-sampleValueTable = createValueMapping(sampleValueTable);
-%% 读取软件接收机配置信息
-gnssConfig = ReadGnssConfig(gnssConfig);
-ncoNorm = 2^31/gnssConfig.fs;
-
-MeasTicThrd = uint32(0.1*gnssConfig.fs); % 设定观测量提取频率为10Hz
-if gnssConfig.div3==1,
- ncoNorm = 3*ncoNorm;
- MeasTicThrd = uint32(MeasTicThrd/3);
-end;
-MeasTicCounter = uint32(0);
-TakeMeasFlag = uint32(0);
-
-%% 计算每一次读取中频数据的长度, 目前默认一次读取50毫秒的中频数据
-if gnssConfig.FileFormat==1 % 如果是GPS+BDS模式
- BufferIfLength = ceil(50*gnssConfig.fs/2000); % 一个字节包含两个采样点
- if gnssConfig.div3==1,
- g_ifdat = uint8(zeros(1,ceil(BufferIfLength*2/3)+1000));
- b_ifdat = uint8(zeros(1,ceil(BufferIfLength*2/3)+1000));
- else
- g_ifdat = uint8(zeros(1,ceil(BufferIfLength*2)+1000));
- b_ifdat = uint8(zeros(1,ceil(BufferIfLength*2)+1000));
- end;
-else % 如果是单GPS模式
- BufferIfLength = ceil(50*gnssConfig.fs/4000); % 一个字节包含四个采样点
- if gnssConfig.div3==1,
- g_ifdat = uint8(zeros(1,ceil(BufferIfLength*4/3)+1000));
- b_ifdat = uint8(zeros(1,ceil(BufferIfLength*4/3)+1000));
- else
- g_ifdat = uint8(zeros(1,ceil(BufferIfLength*4)+1000));
- b_ifdat = uint8(zeros(1,ceil(BufferIfLength*4)+1000));
- end;
-end;
-
-%% 初始化物理常量
-PhyConstant.L1_freq = 1575.42E6;
-PhyConstant.B1_freq = 1561.098E6;
-PhyConstant.C = 2.99792458E8;
-PhyConstant.C_INV =3.33564095198152e-9;
-PhyConstant.L1_lambda = PhyConstant.C/PhyConstant.L1_freq;
-PhyConstant.B1_lambda = PhyConstant.C/PhyConstant.B1_freq;
-PhyConstant.PI = 3.141592653589793238;
-PhyConstant.F_RC = -4.442807633E-10; %相对论效应校正参数
-PhyConstant.GM = 3.986005e14;
-PhyConstant.OMEGAE84 = 7.2921151467e-5; % 地球自转角速度
-PhyConstant.WGS84_A = 6378137.0; %WGS84 地球半长轴
-PhyConstant.SEC_IN_WEEK = 604800; %周内秒计数总数
-PhyConstant.HalfSEC_IN_WEEK = 302400;%周内秒计数一半数
-
-%% 初始化GPS伪随机码
-for i=1:33,
- gpsPrnTbl(i,:) = GpsCodeGen(i);
-end;
-%% 初始化北斗伪随机码
-for i=1:33,
- bdPrnTbl(i,:) = BdCodeGen(i);
-end;
-
-
-%% 对GPS和北斗伪随机码进行重采样
- % GPS code case
-for i=1:2048,
- k=floor(i*1.023E6/2.048E6);
- for m=1:33
- gpsCode2048(m,i) = gpsPrnTbl(m,( mod(k,1023)+1 ) );
- end;
-end;
- % BD code case
-for i=1:4096,
- k=floor(i*2.046E6/4.096E6);
- for m=1:33,
- bdCode4096(m,i) = bdPrnTbl(m,( mod(k,2046)+1 ) );
- end;
-end;
-
-
-%% 初始化GPS和北斗卫星捕获跟踪状态
-for i=1:32,
- gpsSvStatus(i).state = 0;
- gpsSvStatus(i).doppler = 0;
- gpsSvStatus(i).code = 0;
-end;
-for i=1:14,
- bdSvStatus(i).state = 0;
- bdSvStatus(i).doppler = 0;
- bdSvStatus(i).code = 0;
- bdSvStatus(i).NHidx = 0;
-end;
-
-%% 初始化中频数据文件句柄
-ifFileHdle = -1;
-
-%% 初始化正弦、余弦表
-Carrier_I_tbl = [ 0, 6,11,15,16,15, 11, 6, 0, -6,-11,-15,-16,-15,-11,-6];
-Carrier_Q_tbl = [16,15,11, 6, 0,-6,-11,-15,-16,-15,-11, -6, 0, 6, 11,15];
-
-%% 初始化乘法结果表
-for i=1:128,
- cdIdx = bitget(i,7);
- smpIdx = bitand(bitshift(i,-4),3);
- phIdx = bitand(i,15);
- MuxTbl(2*i-1) = cdvalue(cdIdx+1)*bitmapvalue(smpIdx+1)*Carrier_I_tbl(phIdx+1);
- MuxTbl(2*i) = cdvalue(cdIdx+1)*bitmapvalue(smpIdx+1)*Carrier_Q_tbl(phIdx+1);
-end;
-halfChipPhaseStep = 2^30; % 0.5 chip spacing
-
-%% 初始化跟踪通道
-for i=1:24, % 24个跟踪通道
- ResetChannel(i);
-end;
-%% 初始化观测量
-measGnss.num = 0;
-measGnss.timetag = 0.0;
-measGnss.prn = zeros(1,24,'uint8');
-measGnss.gnssId = zeros(1,24,'uint8');
-measGnss.CN0 = zeros(1,24,'uint8');
-measGnss.pseudo_cd_ph = zeros(1,24);
-measGnss.doppler = zeros(1,24);
-%% 初始化本地时间和位置、速度
-localTime.accu = 0;
-localTime.second = 0.0;
-localTime.week =0;
-localTime.timetag = 0;
-
-localPosvel.pos = zeros(1,3);
-localPosvel.llh = zeros(1,3);
-localPosvel.dops = zeros(1,4);
-localPosvel.bias = 0;
-localPosvel.gbto = 0;
-localPosvel.vel = zeros(1,3);
-localPosvel.velENU = zeros(1,3);
-localPosvel.drift = 0;
-localPosvel.mode = uint8(0);
-localPosvel.valid = uint8(0);
-localPosvel.svnum = uint8(0);
-localPosvel.fixSvSet = uint32(0);
-localPosvel.fixSvSetBD = uint32(0);
-localPosvel.localT = 0;
-
-localPosvelKF.pos = zeros(1,3);
-localPosvelKF.llh = zeros(1,3);
-localPosvelKF.dops = zeros(1,4);
-localPosvelKF.bias = 0;
-localPosvelKF.gbto = 0;
-localPosvelKF.vel = zeros(1,3);
-localPosvelKF.velENU = zeros(1,3);
-localPosvelKF.drift = 0;
-localPosvelKF.mode = uint8(0);
-localPosvelKF.valid = uint8(0);
-localPosvelKF.svnum = uint8(0);
-localPosvelKF.fixSvSet = uint32(0);
-localPosvelKF.fixSvSetBD = uint32(0);
-localPosvelKF.localT = 0;
-
-%% 初始化卡尔曼滤波器
-kalmanFilter.state = 0; %初始化标志
-kalmanFilter.x = zeros(1,9);
-kalmanFilter.dx = zeros(1,9);
-kalmanFilter.P = zeros(9,9);
-kalmanFilter.phi = zeros(9,9);
-kalmanFilter.Q = zeros(9,9);
-kalmanFilter.measNum = 0;
-kalmanFilter.Hvec = zeros(24,3);
-kalmanFilter.measRange = zeros(1,24);
-kalmanFilter.measDoppler = zeros(1,24);
-kalmanFilter.Rrange = zeros(1,24);
-kalmanFilter.Rdoppler = zeros(1,24);
-kalmanFilter.localT = 0;
-kalmanFilter.gbto_init = 0;
-kalmanFilter.progagationTime = 0;
-kalmanFilter.lsinitState = 0;
-
-%% 初始化GPS 星历参数
-for k=1:32,
- GpsEph(k).valid = 0;
- GpsEph(k).health = uint8(255);
- GpsEph(k).toc = 0;
- GpsEph(k).toe = 0;
- GpsEph(k).dn = 0;
- GpsEph(k).cuc = 0;
- GpsEph(k).cus = 0;
- GpsEph(k).cic = 0;
- GpsEph(k).cis = 0;
- GpsEph(k).crc = 0;
- GpsEph(k).crs = 0;
- GpsEph(k).ety = 0;
- GpsEph(k).sqra = 0;
- GpsEph(k).ma = 0;
- GpsEph(k).w0 = 0;
- GpsEph(k).inc0 = 0;
- GpsEph(k).omega = 0;
- GpsEph(k).omegadot = 0;
- GpsEph(k).idot = 0;
- GpsEph(k).af0 = 0;
- GpsEph(k).af1 = 0;
- GpsEph(k).af2 = 0;
- GpsEph(k).tgd = 0;
- GpsEph(k).iodc = 0;
- GpsEph(k).iode = 0;
- GpsEph(k).iode2 = 0;
- GpsEph(k).tow = 0;
- GpsEph(k).ura = 0;
- GpsEph(k).week = 0;
-end;
-%初始化北斗星历数据
-for k=1:32,
- BdEph(k).valid = 0;
- BdEph(k).health = uint8(255);
- BdEph(k).toc = 0;
- BdEph(k).toe = 0;
- BdEph(k).dn = 0;
- BdEph(k).cuc = 0;
- BdEph(k).cus = 0;
- BdEph(k).cic = 0;
- BdEph(k).cis = 0;
- BdEph(k).crc = 0;
- BdEph(k).crs = 0;
- BdEph(k).ety = 0;
- BdEph(k).sqra = 0;
- BdEph(k).ma = 0;
- BdEph(k).w0 = 0;
- BdEph(k).inc0 = 0;
- BdEph(k).omega = 0;
- BdEph(k).omegadot = 0;
- BdEph(k).idot = 0;
- BdEph(k).af0 = 0;
- BdEph(k).af1 = 0;
- BdEph(k).af2 = 0;
- BdEph(k).tgd = 0;
- BdEph(k).tgd2 = 0;
- BdEph(k).iodc = 0;
- BdEph(k).iode = 0;
- BdEph(k).iode2 = 0;
- BdEph(k).tow = 0;
- BdEph(k).ura = 0;
- BdEph(k).week = 0;
-end;
-
-% MuxTbl = double(MuxTbl);
-% gpsPrnTbl = double(gpsPrnTbl);
-% bdPrnTbl = double(bdPrnTbl);
-```
-
-
-
-## 六、main_fig():主界面
-
-
-
-
-
-## 七、AcquisitionEngine():信号捕获
-
-执行流程:
-
-1. `global`全局变量
-2. 计算参与信号捕获的采样点数目
-3. 调用`DownSampling()`,完成降采样过程和串并转换过程,降采样到2.048MHz(GPS)或4.096MHz(BDS)
-4. for循环遍历GPS信号:
- * 遍历每一个跟踪通道,检测当前GPS信号是否被跟踪
- * 如果没有被跟踪,调用`AcquisitionByFFT()`利用FFT方法实现伪码相位纬度的并行搜索
- *
-
-
-
-
-
-
-
-
-
-
-
-
-
-## 八、AllocateTrackingChannel():分配跟踪通道
-
-
-
-
-
-
-
-
-
-## 九、SignalTracking():信号跟踪
-
-
-
-
-
-## 十、gnssPvt():伪距和多普勒PVT解算
-
-1.
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211PVT\350\247\243\347\256\227.md" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211PVT\350\247\243\347\256\227.md"
deleted file mode 100644
index e69de29..0000000
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\212\200\346\234\257\347\240\224\347\251\266\345\217\212\347\263\273\347\273\237\347\232\204\345\256\236\347\216\260_\346\235\216\345\255\237\346\201\222.pdf" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\212\200\346\234\257\347\240\224\347\251\266\345\217\212\347\263\273\347\273\237\347\232\204\345\256\236\347\216\260_\346\235\216\345\255\237\346\201\222.pdf"
deleted file mode 100644
index a9929bc..0000000
Binary files "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\212\200\346\234\257\347\240\224\347\251\266\345\217\212\347\263\273\347\273\237\347\232\204\345\256\236\347\216\260_\346\235\216\345\255\237\346\201\222.pdf" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232C\350\257\255\350\250\200\347\250\213\345\272\217\347\274\226\350\257\221\344\275\277\347\224\250.md" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232C\350\257\255\350\250\200\347\250\213\345\272\217\347\274\226\350\257\221\344\275\277\347\224\250.md"
deleted file mode 100644
index 82198e7..0000000
--- "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232C\350\257\255\350\250\200\347\250\213\345\272\217\347\274\226\350\257\221\344\275\277\347\224\250.md"
+++ /dev/null
@@ -1,170 +0,0 @@
-
-
-[TOC]
-
-## 一、编译
-
-
-
-
-
-
-
-## 二、pocket_acq:信号捕获
-
-```c
-pocket_aqc [-sig sig] [-prn prn[,...]] [-tint tint] [-toff toff]
- [-f freq] [-fi freq] [-d freq] [-nz] file
-```
-
-从数字中频信号中查找 GNSS 信号,并绘绘制出捕获结果。
-
-
-
-**命令行参数**:
-
-```c
--sig sig GNSS 信号类型 (L1CA, L2CM, ...)
--prn prn[,...] PRN 码,用英文逗号分隔,可以填单独 PRN 码,也可填 PRN 码范围 (1-32)
--tint tint 搜索 GNSS 的间隔 (ms) [code cycle]
--toff toff 中频信号起始位置 (ms) [0.0]
--f freq 中频信号采样频率 (MHz) [12.0]
--fi freq 中频信号频率 (MHz) [0.0]
--d freq 最大多普勒频移 (Hz) [5000.0]
--nz 信号捕获的相关结果阈值
--h 输出帮助信息:使用方式、信号 ID
-file 输入数字中频信号文件的路径,格式为连续的 int8_t,
- 可以存实采样(I),也可以存复采样(IQ)
-```
-
-
-
-
-
-## 三、pocket_trk:信号跟踪
-
-```c
-pocket_trk [-sig sig] [-prn prn[,...]] [-toff toff] [-f freq]
- [-fi freq] [-IQ] [-ti tint] [-log path] [-out path] [-q] [file]
-```
-
-
-
-**命令行参数**:
-
-```c
--sig sig GNSS 信号类型 (L1CA, L2CM, ...)
--prn prn[,...] [file]
--toff toff 中频信号起始位置 (ms) [0.0]
--f freq 中频信号采样频率 (MHz) [12.0]
--fi freq 中频信号频率 (MHz) [0.0]
--IQ
--ti tint 信号跟踪状态的更新间隔 (s) [0.05]
--log path 日志输出路径,记录导航电文解码信息、码偏差,路径要求如下:
- 1. 本地文件路径 (不含":"),可以包含通配符 (%Y, %m, %d, %h, %M)
- 2. TCP 服务端,需要端口号 [:port]
- 3. TCP 客户段,需要地址和端口号 [address:port]
--out path 输出数据流用来输出特殊信息,包括 UBX-RXM-QZSSL6 信息。
--q Suppress showing signal tracking status
-[file] 输入数字中频信号文件的路径,格式为连续的 int8_t,
- 可以存实采样(I),也可以存复采样(IQ)
-```
-
-
-
-
-
-
-
-## 四、pocket_scan:串口扫描
-
-```c
-pocket_scan [-e]
-```
-
-
-
-
-
-
-
-
-
-## 五、pocket_conf:射频前端配置
-
-```c
-pocket_conf [-s] [-a] [-h] [-p bus[,port]] [conf_file]
-```
-
-
-
-
-
-**命令行参数**:
-
-```c
--s 保存配置到射频前端的 EEPROM
--a
--h
--p [bus[,port]] USB 总线和端口号。
-conf_file
-```
-
-
-
-
-
-## 六、pocket_dump:射频前端采集数字中频信号
-
-```c
-pocket_dump [-t tsec] [-r] [-p bus[,port]] [-c conf_file] [-q]
- [file [file]]
-```
-
-
-
-
-
-
-
-**命令行参数**:
-
-```c
--t tsec 采集数据的时间 (s)
--r Dump raw SDR device data without channel separation and quantization.
--p bus[,port] USB 总线和端口号。
--c conf_file 配置文件。
--q Suppress showing data dump status.
-[file [file]] 输出中频信号文件路径,可以双通道输出两个文件。
- * 如果用了 -r 参数,那只会用第一个文件路径。
- * 如果文件路径传 "",不输出。
- * 如果文件路径传 -,输出到 stdout。
- 默认文件名:
- * ch1_YYYYMMDD_hhmmss.bin
- * ch2_YYYYMMDD_hhmmss.bin
-```
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232Python \350\204\232\346\234\254\344\275\277\347\224\250.md" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232Python \350\204\232\346\234\254\344\275\277\347\224\250.md"
deleted file mode 100644
index 5f56056..0000000
--- "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232Python \350\204\232\346\234\254\344\275\277\347\224\250.md"
+++ /dev/null
@@ -1,66 +0,0 @@
->
-
-[TOC]
-
-## 一、Python 环境配置
-
-
-
-
-
-## 二、pocket_psd.py:
-
-
-
-
-
-## 三、pocket_acq.py
-
-
-
-
-
-## 四、pocket_trk.py
-
-
-
-
-
-## 五、pocket_snap.py
-
-
-
-
-
-## 六、pocket_plot.py
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/01-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/01-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md"
deleted file mode 100644
index 6bafdb7..0000000
--- "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/01-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md"
+++ /dev/null
@@ -1,63 +0,0 @@
-> 原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
-
-[TOC]
-
-## 一、程序简介
-
-### 1、概述
-
-PocketSDR 是 RTKLIB 作者写的一款 GNSS 软件接收机,包含一个射频前端和一套后处理 GNSS 接收机程序(只支持后处理),实现了一整套完整的 GNSS 接收机功能,采用 C、Python 编写,支持几乎所有的 GNSS 信号(比商业接收机支持的还要多),目前 0.8 版本的程序支持的信号如下:
-
-* **GPS**: L1C/A, L1CP, L1CD, L2CM, L5I, L5Q,
-* **GLONASS**: L1C/A, L2C/A, L3OCD, L3OCP,
-* **Galileo**: E1B, E1C, E5aI, E5aQ, E5bI, E5bQ, E6B, E6C,
-* **QZSS**: L1C/A, L1C/B, L1CP,L1CD, L1S, L2CM, L5I, L5Q, L5SI, L5SQ, L6D, L6E,
-* **BeiDou**: B1I, B1CP, B1CD, B2I,B2aD, B2aP, B2bI, B3I,
-* **NavIC**: L5-SPS, SBAS: L1C/A, L5I, L5Q
-
-不同于 RTKLIB 等 GNSS 数据处理软件,PocketSDR 直接对 GNSS 信号进行处理,
-
-
-
-### 2、文件结构
-
-
-
-考虑到上述的运动学模型,推导出 IMU 运动积分的计算公式如下:
-$$
-\begin{aligned} \mathbf{q}_{\mathrm{b}_{m}}^{\mathrm{w}} & =\mathbf{q}_{\mathrm{w}_{\mathrm{i}(m-1)}}^{\mathrm{w}}\left(t_{m}\right) \otimes \mathbf{q}_{\mathrm{b}_{\mathrm{i}(m-1)}}^{\mathrm{w}_{\mathrm{i}(m-1)}} \otimes \mathbf{q}_{\mathrm{b}_{m}}^{\mathrm{b}_{(m-1)}} \\ \boldsymbol{v}_{\mathrm{wb}_{m}}^{\mathrm{w}} & =\boldsymbol{v}_{\mathrm{wb}_{m-1}}^{\mathrm{w}}+\int_{t_{m-1}}^{t_{m}} \mathbf{R}_{\mathrm{w}_{\mathrm{i}(m-1)}}^{\mathrm{w}}(t) \mathbf{R}_{\mathrm{b}_{\mathrm{i}(m-1)}}^{\mathrm{w}_{\mathrm{i}(m-1)}} \mathbf{R}_{\mathrm{b}_{t}}^{\mathrm{b}_{\mathrm{i}(m-1)}} \boldsymbol{f}^{b} d t \\ & +\int_{t_{m-1}}^{t_{m}}\left(\boldsymbol{g}^{\mathrm{w}}-2 \boldsymbol{w}_{\mathrm{ie}}^{\mathrm{w}} \times \boldsymbol{v}_{\mathrm{wb}_{t}}^{\mathrm{w}}\right) d t \\ \boldsymbol{p}_{\mathrm{wb}_{m}}^{\mathrm{w}} & =\boldsymbol{p}_{\mathrm{wb}_{m-1}}^{\mathrm{w}}+\int_{t_{m-1}}^{t_{m}} \boldsymbol{v}_{\mathrm{wb}_{t}}^{\mathrm{w}} d t\end{aligned}
-$$
-其中,下标 $m$ 和 $m-1$ 表示 $t_{m}$ 和 $t_{m-1}$ 时刻,下标 $\mathrm{w}_{\mathrm{i}(\mathrm{m}-1)}$ 表示上一时刻 $w$ 系相对于 $i$ 系的旋转,下标 $\mathrm{b}_{i(m-1)}$ 表示上一时刻 $b$ 系相对于 $i$ 系的旋转,$\mathbf{q}_{\mathrm{b}_{(-m-1)}}^{w_{i(m-1)}}=\mathbf{q}_{\mathrm{b}_{m-1}}^{\mathrm{w}}$ 表示 $b$ 系相对于 $w$ 系的旋转,公式可改写为:
-$$
-\begin{array}{l}
-\mathbf{q}_{b_{m}}^{w}=\mathbf{q}_{w_{1(m-1)}}^{w^{}}\left(t_{m}\right) \otimes \mathbf{q}_{b_{i}(m-1)}^{w_{i(m-1)}} \otimes \mathbf{q}_{b_{m}}^{b_{i}(m-1)}, \\
-\boldsymbol{v}_{\mathrm{wb}_{m}}^{\mathrm{w}}=\boldsymbol{v}_{w \mathrm{~b}_{m-1}}^{\mathrm{w}}+\frac{1}{2}\left[\mathbf{R}_{w_{(,(m-1)}}^{\mathrm{w}}\left(t_{m}\right)+\mathbf{I}\right] \mathbf{R}_{\mathrm{b}_{(-,-1)}}^{w_{(i,-1)}} \Delta \boldsymbol{v}_{f, m}^{\mathrm{b}} \\
-+\left(\boldsymbol{g}^{w}-2 \boldsymbol{w}_{k}^{w} \times \boldsymbol{v}_{w b_{m-1}}^{w}\right) \Delta t_{m-1, m}, \\
-p_{w_{b}}^{\mathrm{w}}=p_{\mathrm{wb}_{m-1}}^{\mathrm{w}}+\frac{1}{2}\left(\boldsymbol{v}_{\mathrm{wb}_{m-1}}^{\mathrm{w}}+\boldsymbol{v}_{\mathrm{wb}_{m}}^{\mathrm{w}}\right) \Delta t_{m-1, m}, \\
-\end{array}
-$$
-其中,$b$ 系旋转矢量 $\mathbf{q}_{b_{m}}^{b_{i(m-1)}}$ 对应增量 $\Delta \boldsymbol{\theta}_{m}$,可以采用双子样算法,进一步提高运动积分的精度 ^[1]-[3]^。四元数 $\mathbf{q}_{w_{i(m-1)}}^{\mathrm{w}}\left(t_{m}\right)$ 或者旋转矩阵 $\mathbf{R}_{w_{(m-1)}}^{w}\left(t_{m}\right)$ 是由地球自转引起的,其自转矢量可表示为:
-$$
-\phi_{w_{i j-1 i}}^{w}\left(t_{m}\right)=-w_{i e}^{w} \Delta t_{m-1, m} .
-$$
-
-### 3、IMU 预积分
-
-
-
-
-
-
-
-
-
-## 三、基于因子图优化的 GNSS/INS 组合导航
-
-
-
-
-
-
-
-## 四、实验及结果
-
-
-
-
-
-
-
-## 五、结论
-
-
-
-
-
-
-
-
-
-## 参考文献
-
-1. P. G. Savage, “Strapdown Inertial Navigation Integration Algorithm Design Part 1: Attitude Algorithms,” *J. Guid. Control Dyn.*, vol. 21, no. 1, pp. 19–28, 1998.
-
-2. P. G. Savage, “Strapdown Inertial Navigation Integration Algorithm Design Part 2: Velocity and Position Algorithms,” *J. Guid. Control Dyn.*, vol. 21, no. 2, pp. 208–221, 1998.
-
-3. P. D. Groves, *Principles of GNSS, inertial, and multisensor integrated* *navigation systems*. Boston: Artech House, 2008.
-
-4. C. Shen *et al.*, “Seamless GPS/Inertial Navigation System Based on Self-Learning Square-Root Cubature Kalman Filter,” *IEEE Trans. Ind.* *Electron.*, vol. 68, no. 1, pp. 499–508, 2021.
-
-5. B. Gao, G. Hu, Y. Zhong, and X. Zhu, “Cubature Kalman Filter With Both Adaptability and Robustness for Tightly-Coupled GNSS/INS Integration,” *IEEE Sens. J.*, vol. 21, no. 13, pp. 14997–15011, Jul. 2021.
-
-6. Q. Zhang, X. Niu, H. Zhang, and C. Shi, “Algorithm Improvement of the Low-End GNSS/INS Systems for Land Vehicles Navigation,” *Math.* *Probl. Eng.*, vol. 2013, pp. 1–12, 2013.
-
-7. X. Niu, H. Zhang, C. Shi, K.-W. Chiang, and N. El-Sheimy, “A proposed evaluation standard for the navigation results of MEMS INS/GPS integrated systems,” in *Proceedings of the International Symposium on* *GPS/GNSS*, 2010, pp. 1–5.
-
-8. C. Cadena *et al.*, “Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age,” *IEEE Trans. Robot.*, vol. 32, no. 6, pp. 1309–1332, Dec. 2016.
-
-9. G. Huang, “Visual-Inertial Navigation: A Concise Review,” in *2019* *International Conference on Robotics and Automation (ICRA)*, May 2019, pp. 9572–9582.
-
-10. D. Rouzaud and J. Skaloud, “Rigorous Integration of Inertial Navigation with Optical Sensors by Dynamic Networks,” *Navigation*, vol. 58, no. 2, pp. 141–152, Jun. 2011.
-
-11. D. A. Cucci, M. Rehak, and J. Skaloud, “Bundle adjustment with raw inertial observations in UAV applications,” *ISPRS J. Photogramm.* *Remote Sens.*, vol. 130, pp. 1–12, Aug. 2017.
-
-12. D. A. Cucci and J. Skaloud, “ON RAW INERTIAL MEASUREMENTS IN DYNAMIC NETWORKS,” *ISPRS Ann. Photogramm. Remote Sens.* *Spat. Inf. Sci.*, vol. IV-2/W5, pp. 549–557, May 2019.
-
-13. W. Wen, T. Pfeifer, X. Bai, and L.-T. Hsu, “Factor graph optimization for GNSS/INS integration: A comparison with the extended Kalman filter,” *NAVIGATION*, vol. 68, no. 2, pp. 315–331, 2021.
-
-14. S. Zhao, Y. Chen, and J. A. Farrell, “High-Precision Vehicle Navigation in Urban Environments Using an MEM’s IMU and Single-Frequency GPS Receiver,” *IEEE Trans. Intell. Transp. Syst.*, vol. 17, no. 10, pp. 2854–2867, Oct. 2016.
-
-15. K. Eckenhoff, P. Geneva, and G. Huang, “Closed-form preintegration methods for graph-based visual–inertial navigation,” *Int. J. Robot. Res.*, vol. 38, no. 5, pp. 563–586, Apr. 2019.
-
-16. W. Wen, X. Bai, Y. C. Kan, and L.-T. Hsu, “Tightly Coupled GNSS/INS Integration via Factor Graph and Aided by Fish-Eye Camera,” *IEEE* *Trans. Veh. Technol.*, vol. 68, no. 11, pp. 10651–10662, Nov. 2019.
-
-17. T. Lupton and S. Sukkarieh, “Visual-Inertial-Aided Navigation for High-Dynamic Motion in Built Environments Without Initial Conditions,” *IEEE Trans. Robot.*, vol. 28, no. 1, pp. 61–76, Feb. 2012.
-
-18. C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-Manifold Preintegration for Real-Time Visual--Inertial Odometry,” *IEEE Trans.* *Robot.*, vol. 33, no. 1, pp. 1–21, Feb. 2017.
-
-19. A. Barrau and S. Bonnabel, “A Mathematical Framework for IMU Error Propagation with Applications to Preintegration,” in *2020 IEEE* *International Conference on Robotics and Automation (ICRA)*, May 2020, pp. 5732–5738.
-
-20. M. Brossard, A. Barrau, P. Chauchat, and S. Bonnabel, “Associating Uncertainty to Extended Poses for on Lie Group IMU Preintegration With Rotating Earth,” *IEEE Trans. Robot.*, pp. 1–18, 2021.
-
-21. Y. Luo, C. Guo, and J. Liu, “Equivariant filtering framework for inertial-integrated navigation,” *Satell. Navig.*, vol. 2, no. 1, p. 30, Dec. 2021
-
-22. S. Shen, N. Michael, and V. Kumar, “Tightly-coupled monocular visual-inertial fusion for autonomous flight of rotorcraft MAVs,” in *2015* IEEE International Conference on Robotics and Automation (ICRA)*, May 2015, pp. 5303–5310.
-
-23. T. Qin, P. Li, and S. Shen, “VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator,” *IEEE Trans. Robot.*, vol. 34, no. 4, pp. 1004–1020, Aug. 2018.
-
-24. J. Jiang, X. Niu, and J. Liu, “Improved IMU Preintegration with Gravity Change and Earth Rotation for Optimization-Based GNSS/VINS,” *Remote Sens.*, vol. 12, no. 18, Art. no. 18, Jan. 2020.
-
-25. L. Chang, X. Niu, and T. Liu, “GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration,” *Sensors*, vol. 20, no. 17, p. 4702, Aug. 2020.
-
-26. S. Bai, J. Lai, P. Lyu, Y. Cen, and B. Ji, “Improved Preintegration Method for GNSS/IMU/In-Vehicle Sensors Navigation using Graph Optimization,” *IEEE Trans. Veh. Technol.*, pp. 1–1, 2021.
-
-27. J. Henawy, Z. Li, W.-Y. Yau, and G. Seet, “Accurate IMU Factor Using
-
- Switched Linear Systems for VIO,” *IEEE Trans. Ind. Electron.*, vol. 68,
-
- no. 8, pp. 7199–7208, Aug. 2021.
-
-28. L. Wang, H. Tang, T. Zhang, Q. Chen, J. Shi, and X. Niu, “Improving the Navigation Performance of the MEMS IMU Array by Precise Calibration,” *IEEE Sens. J.*, vol. 21, no. 22, pp. 26050–26058, 2021.
-
-29. H. Tang, X. Niu, T. Zhang, Y. Li, and J. Liu, “OdoNet: Untethered Speed Aiding for Vehicle Navigation Without Hardware Wheeled Odometer,” *IEEE Sens. J.*, vol. 22, no. 12, pp. 12197–12208, Jun. 2022.
-
-30. Agarwal, Sameer, Mierle, and Keir, “Ceres Solver — A Large Scale Non-linear Optimization Library.” [Online]. Avaliable: http://ceres-solver.org/
-
-31. J. Engel, V. Koltun, and D. Cremers, “Direct Sparse Odometry,” *IEEE* *Trans. Pattern Anal. Mach. Intell.*, vol. 40, no. 3, pp. 611–625, Mar. 2018
-
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM \345\273\266\344\274\270.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM \345\273\266\344\274\270.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM \345\273\266\344\274\270.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM \345\273\266\344\274\270.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM3\345\237\272\347\241\200\347\237\245\350\257\206\347\202\271.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM3\345\237\272\347\241\200\347\237\245\350\257\206\347\202\271.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM3\345\237\272\347\241\200\347\237\245\350\257\206\347\202\271.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/00-ORB-SLAM3\345\237\272\347\241\200\347\237\245\350\257\206\347\202\271.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/01-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\277\220\350\241\214\343\200\201\344\270\273\350\246\201\346\211\247\350\241\214\346\265\201\347\250\213.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/01-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\277\220\350\241\214\343\200\201\344\270\273\350\246\201\346\211\247\350\241\214\346\265\201\347\250\213.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/01-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\277\220\350\241\214\343\200\201\344\270\273\350\246\201\346\211\247\350\241\214\346\265\201\347\250\213.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/01-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\277\220\350\241\214\343\200\201\344\270\273\350\246\201\346\211\247\350\241\214\346\265\201\347\250\213.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/02-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211Tracking \347\272\277\347\250\213.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/02-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211Tracking \347\272\277\347\250\213.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/02-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211Tracking \347\272\277\347\250\213.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/02-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211Tracking \347\272\277\347\250\213.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/03-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\211\357\274\211LocalMapping \347\272\277\347\250\213.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/03-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\211\357\274\211LocalMapping \347\272\277\347\250\213.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/03-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\211\357\274\211LocalMapping \347\272\277\347\250\213.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/03-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\211\357\274\211LocalMapping \347\272\277\347\250\213.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/04-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\345\233\233\357\274\211Loop&Merging \347\272\277\347\250\213.md" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/04-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\345\233\233\357\274\211Loop&Merging \347\272\277\347\250\213.md"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/04-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\345\233\233\357\274\211Loop&Merging \347\272\277\347\250\213.md"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/04-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\345\233\233\357\274\211Loop&Merging \347\272\277\347\250\213.md"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Bags of Binary Words for Fast Place Recognition in Image Sequences.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Bags of Binary Words for Fast Place Recognition in Image Sequences.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Bags of Binary Words for Fast Place Recognition in Image Sequences.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Bags of Binary Words for Fast Place Recognition in Image Sequences.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Calibration_Tutorial.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Calibration_Tutorial.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Calibration_Tutorial.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Calibration_Tutorial.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Inertial-Only Optimization for Visual-Inertial Initialization.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Inertial-Only Optimization for Visual-Inertial Initialization.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Inertial-Only Optimization for Visual-Inertial Initialization.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Inertial-Only Optimization for Visual-Inertial Initialization.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM-2015-a Versatile and Accurate Monocular SLAM System.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM-2015-a Versatile and Accurate Monocular SLAM System.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM-2015-a Versatile and Accurate Monocular SLAM System.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM-2015-a Versatile and Accurate Monocular SLAM System.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2 \350\256\272\346\226\207\347\277\273\350\257\221.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2 \350\256\272\346\226\207\347\277\273\350\257\221.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2 \350\256\272\346\226\207\347\277\273\350\257\221.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2 \350\256\272\346\226\207\347\277\273\350\257\221.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2-2016-an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2-2016-an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2-2016-an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM2-2016-an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM3 An Accurate Open-Source Library.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM3 An Accurate Open-Source Library.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM3 An Accurate Open-Source Library.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM3 An Accurate Open-Source Library.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\347\263\273\347\273\237\347\211\271\345\276\201\345\210\206\346\236\220\347\240\224\347\251\266_\350\226\233\347\221\236.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\347\263\273\347\273\237\347\211\271\345\276\201\345\210\206\346\236\220\347\240\224\347\251\266_\350\226\233\347\221\236.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\347\263\273\347\273\237\347\211\271\345\276\201\345\210\206\346\236\220\347\240\224\347\251\266_\350\226\233\347\221\236.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\347\263\273\347\273\237\347\211\271\345\276\201\345\210\206\346\236\220\347\240\224\347\251\266_\350\226\233\347\221\236.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\350\257\246\350\247\243_\345\220\264\345\215\232_\346\263\241\346\263\241\346\234\272\345\231\250\344\272\272.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\350\257\246\350\247\243_\345\220\264\345\215\232_\346\263\241\346\263\241\346\234\272\345\231\250\344\272\272.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\350\257\246\350\247\243_\345\220\264\345\215\232_\346\263\241\346\263\241\346\234\272\345\231\250\344\272\272.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORB-SLAM\350\257\246\350\247\243_\345\220\264\345\215\232_\346\263\241\346\263\241\346\234\272\345\231\250\344\272\272.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORBSLAM-Atlas\357\274\232a robust and accurate multi-map system.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORBSLAM-Atlas\357\274\232a robust and accurate multi-map system.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORBSLAM-Atlas\357\274\232a robust and accurate multi-map system.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/ORBSLAM-Atlas\357\274\232a robust and accurate multi-map system.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/PTAM2007-Parallel Tracking and Mapping for Small AR Workspaces-KleinMurray2007ISMAR.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/PTAM2007-Parallel Tracking and Mapping for Small AR Workspaces-KleinMurray2007ISMAR.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/PTAM2007-Parallel Tracking and Mapping for Small AR Workspaces-KleinMurray2007ISMAR.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/PTAM2007-Parallel Tracking and Mapping for Small AR Workspaces-KleinMurray2007ISMAR.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Visual-Inertial Monocular SLAM with Map Reuse.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Visual-Inertial Monocular SLAM with Map Reuse.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Visual-Inertial Monocular SLAM with Map Reuse.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/Visual-Inertial Monocular SLAM with Map Reuse.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Atlas \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Atlas \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Atlas \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Atlas \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Frame \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Frame \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Frame \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Frame \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/FrameDrawer \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/FrameDrawer \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/FrameDrawer \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/FrameDrawer \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/G2oTypes.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/G2oTypes.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/G2oTypes.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/G2oTypes.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/IMU \347\261\273\345\236\213.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/IMU \347\261\273\345\236\213.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/IMU \347\261\273\345\236\213.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/IMU \347\261\273\345\236\213.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Initializer \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Initializer \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Initializer \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Initializer \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrame \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrame \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrame \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrame \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrameDatabase \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrameDatabase \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrameDatabase \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/KeyFrameDatabase \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LocalMapping \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LocalMapping \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LocalMapping \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LocalMapping \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LoopClosing \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LoopClosing \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LoopClosing \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/LoopClosing \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MLPnPsolver \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MLPnPsolver \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MLPnPsolver \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MLPnPsolver \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Map \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Map \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Map \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Map \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapDrawer \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapDrawer \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapDrawer \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapDrawer \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapPoint \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapPoint \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapPoint \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/MapPoint \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/ORB-SLAM3\346\226\207\344\273\266\347\273\223\346\236\204.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/ORB-SLAM3\346\226\207\344\273\266\347\273\223\346\236\204.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/ORB-SLAM3\346\226\207\344\273\266\347\273\223\346\236\204.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/ORB-SLAM3\346\226\207\344\273\266\347\273\223\346\236\204.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/OptimizableTypes \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/OptimizableTypes \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/OptimizableTypes \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/OptimizableTypes \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System\346\236\204\351\200\240\345\207\275\346\225\260.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System\346\236\204\351\200\240\345\207\275\346\225\260.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System\346\236\204\351\200\240\345\207\275\346\225\260.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/System\346\236\204\351\200\240\345\207\275\346\225\260.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Tracking \347\261\273.xmind" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Tracking \347\261\273.xmind"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Tracking \347\261\273.xmind"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/xmind \346\200\235\347\273\264\345\257\274\345\233\276/Tracking \347\261\273.xmind"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\227\240\344\272\272\346\234\272\350\247\206\350\247\211SLAM\344\270\216\346\203\257\345\257\274\350\236\215\345\220\210\344\275\215\345\247\277\344\274\260\350\256\241\347\256\227\346\263\225\347\240\224\347\251\266_\351\231\210\346\230\223\346\226\207.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\227\240\344\272\272\346\234\272\350\247\206\350\247\211SLAM\344\270\216\346\203\257\345\257\274\350\236\215\345\220\210\344\275\215\345\247\277\344\274\260\350\256\241\347\256\227\346\263\225\347\240\224\347\251\266_\351\231\210\346\230\223\346\226\207.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\227\240\344\272\272\346\234\272\350\247\206\350\247\211SLAM\344\270\216\346\203\257\345\257\274\350\236\215\345\220\210\344\275\215\345\247\277\344\274\260\350\256\241\347\256\227\346\263\225\347\240\224\347\251\266_\351\231\210\346\230\223\346\226\207.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\227\240\344\272\272\346\234\272\350\247\206\350\247\211SLAM\344\270\216\346\203\257\345\257\274\350\236\215\345\220\210\344\275\215\345\247\277\344\274\260\350\256\241\347\256\227\346\263\225\347\240\224\347\251\266_\351\231\210\346\230\223\346\226\207.pdf"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LocalMapping.Run.png" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LocalMapping.Run.png"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LocalMapping.Run.png"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LocalMapping.Run.png"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LoopClosing.run.png" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LoopClosing.run.png"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LoopClosing.run.png"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/LoopClosing.run.png"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/Mono_inertial_tum_vi.cc\346\265\201\347\250\213.png" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/Mono_inertial_tum_vi.cc\346\265\201\347\250\213.png"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/Mono_inertial_tum_vi.cc\346\265\201\347\250\213.png"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/Mono_inertial_tum_vi.cc\346\265\201\347\250\213.png"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/tracking.png" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/tracking.png"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/tracking.png"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\346\265\201\347\250\213\345\233\276/tracking.png"
diff --git "a/09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\350\247\206\350\247\211-\346\203\257\346\200\247SLAM\346\226\271\346\263\225\347\240\224\347\251\266\345\217\212\345\205\266\350\257\257\345\267\256\345\210\206\346\236\220_\345\274\240\344\270\264\344\275\220.pdf" "b/13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\350\247\206\350\247\211-\346\203\257\346\200\247SLAM\346\226\271\346\263\225\347\240\224\347\251\266\345\217\212\345\205\266\350\257\257\345\267\256\345\210\206\346\236\220_\345\274\240\344\270\264\344\275\220.pdf"
similarity index 100%
rename from "09-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\350\247\206\350\247\211-\346\203\257\346\200\247SLAM\346\226\271\346\263\225\347\240\224\347\251\266\345\217\212\345\205\266\350\257\257\345\267\256\345\210\206\346\236\220_\345\274\240\344\270\264\344\275\220.pdf"
rename to "13-ORB-SLAM3\346\272\220\347\240\201\351\230\205\350\257\273/\350\247\206\350\247\211-\346\203\257\346\200\247SLAM\346\226\271\346\263\225\347\240\224\347\251\266\345\217\212\345\205\266\350\257\257\345\267\256\345\210\206\346\236\220_\345\274\240\344\270\264\344\275\220.pdf"
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GPS_BDS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\350\256\276\350\256\241\344\270\216\345\256\236\347\216\260_\351\237\251\350\211\263.pdf" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GPS_BDS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\350\256\276\350\256\241\344\270\216\345\256\236\347\216\260_\351\237\251\350\211\263.pdf"
deleted file mode 100644
index 37a65a7..0000000
Binary files "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GPS_BDS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\350\256\276\350\256\241\344\270\216\345\256\236\347\216\260_\351\237\251\350\211\263.pdf" and /dev/null differ
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\346\211\247\350\241\214\346\265\201\347\250\213\357\274\210\344\273\216startRun\345\274\200\345\247\213\357\274\211.xmind" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\346\211\247\350\241\214\346\265\201\347\250\213\357\274\210\344\273\216startRun\345\274\200\345\247\213\357\274\211.xmind"
deleted file mode 100644
index aedd6a4..0000000
Binary files "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\346\211\247\350\241\214\346\265\201\347\250\213\357\274\210\344\273\216startRun\345\274\200\345\247\213\357\274\211.xmind" and /dev/null differ
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\347\250\213\345\272\217\346\226\207\344\273\266\347\273\223\346\236\204.xmind" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\347\250\213\345\272\217\346\226\207\344\273\266\347\273\223\346\236\204.xmind"
deleted file mode 100644
index fead06a..0000000
Binary files "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/GnssRcvr_V14\347\250\213\345\272\217\346\226\207\344\273\266\347\273\223\346\236\204.xmind" and /dev/null differ
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\345\210\235\350\257\206.md" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\345\210\235\350\257\206.md"
deleted file mode 100644
index 848ba6e..0000000
--- "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\345\210\235\350\257\206.md"
+++ /dev/null
@@ -1,448 +0,0 @@
-## 一、程序概述
-
-
-
-> * 网址:http://www.gnssbook.cn/book2/index.html
->
-> * 程序下载:http://www.gnssbook.cn/book2/GnssRcvr_V14.rar
->
-> * 实例北斗GPS双模中频数据文件下载:[UTREK210_16369000_70s.DAT](https://pan.baidu.com/s/1EWB0oQxDneNDk9iqExLuqQ),提取码: 829c
-
-
-
-
-
-
-
-### 8、UTREK210_16369000_70s.DAT
-
-示例数据
-
-* UTREK210:本书配套的GPS/北斗双模中频数据采集系统
-* 16369000:采样频率
-* 70s:数据总时长70s
-
-
-
-
-
-## 二、程序使用
-
-
-
-
-
-
-
-## 三、startRun.m
-
-执行流程:
-
-1. `clc;clear all;close all;`:清理工作区
-2. `addpath()`:添加工作路径`gui`、`Acquisition`、`Tracking`、`Navmsg`、`PVT`,之后可调用里面的函数
-3. `global`定义全局变量,这些变量主要用于控制程序执行
-4. 为`buffLSResult`、`buffKFResult`开辟空间,用于存最小二乘解和卡尔曼滤波解
-5. 调用`gnssInit()`,初始化和GNSS接收机相关的全局变量
-6. 调用`main_fig()`,生成主界面
-7. `fopen()`以读的方式打开或创建文件`debug.txt`
-8. 为`sigBuff`开辟空间,
-9.
-
-
-
-
-
-## 五、gnssInit():初始化
-
-执行流程:
-
-1. `global`定义**全局变量**
-2. 为一些**全局变量**开辟空间、赋初值
-3. 调用`createValueMapping()`,产生**电平转换和串并转换的查找表**`sampleValueTable`
-4. 调用`ReadGnssConfig()`,获取**配置选项**
-5. 计算**每一次读取中频数据的长度**, 目前默认一次读取50毫秒的中频数据
- *
-6. 初始化**物理常量**(载波频率、光速等)作为`PhyConstant`结构体的成员
-7. 调用`GpsCodeGen()`、`BdCodeGen()`,初始化**伪随机码**`gpsPrnTbl`、`bdPrnTbl`
-8. 对GPS、BDS的**伪随机码**`gpsPrnTbl`、`bdPrnTbl`**重采样**,得到`gpsCode2048`、`bdCode4096`
-9. 初始化GPS和北斗卫星**捕获跟踪状态**结构体`gpsSvStatus`、`bdSvStatus`,成员赋值0
-10. 初始化中频数据**文件句柄**`ifFileHdle`为`-1`
-11. 初始化**正弦、余弦表**`Carrier_I_tbl`、`Carrier_Q_tbl`
-12. 初始化**乘法结果表**`MuxTbl`
-13. 调用`ResetChannel`,初始化24个**跟踪通道**,
-14. 初始化**观测量结构体**`measGnss`
-15. 初始化**本地时间和位置、速度结构体**`localTime`、`localPosvel`、`localPosvelKF`
-16. 初始化**星历参数结构体**`GpsEph`、`BdEph`
-
-```matlab
-function []=gnssInit();
-%% 初始化和GNSS接收机相关的全局变量
-%% 包括物理常量
-
-global gnssConfig;
-global ifFileLength;
-global sampleValueTable;
-global gpsPrnTbl;
-global bdPrnTbl;
-global PhyConstant;
-global ifFileHdle;
-global Carrier_I_tbl;
-global Carrier_Q_tbl;
-global gpsCode2048;
-global bdCode4096;
-global BufferIfLength;
-global gpsSvStatus;
-global bdSvStatus;
-global trackingChannel;
-global measChannel;
-global MuxTbl;
-global halfChipPhaseStep;
-global sysTimeMs;
-global prevSysTimeMs;
-global sampCnt3;
-global Bitmask31;
-global bitmapvalue;
-global ncoNorm;
-global BD_NH_code;
-global GpsEph;
-global BdEph;
-global MeasTicThrd;
-global MeasTicCounter;
-global TakeMeasFlag;
-global measGnss;
-global localPosvel;
-global localTime;
-global kalmanFilter;
-global guidisp;
-global localPosvelKF;
-global Re2t;
-global g_ifdat;
-global b_ifdat;
-
-gpsPrnTbl = zeros(33,1023);
-bdPrnTbl = zeros(33,2046);
-gpsCode2048 = zeros(33,2048);
-bdCode4096 = zeros(33,4096);
-sysTimeMs = 0;
-prevSysTimeMs = 0;
-sampCnt3 = 0;
-ifFileLength = 0;
-Bitmask31 = 2^31 -1;
-guidisp = 1; %显示GUI界面
-Re2t = zeros(3,3);
-bitmapvalue=[1 3 -1 -3];
-cdvalue =[-1 1];
-BD_NH_code = [1 1 1 1 1 -1 1 1 -1 -1 1 -1 1 -1 1 1 -1 -1 -1 1];
-
-%% 产生采样值电平转换表
-sampleValueTable = createValueMapping(sampleValueTable);
-%% 读取软件接收机配置信息
-gnssConfig = ReadGnssConfig(gnssConfig);
-ncoNorm = 2^31/gnssConfig.fs;
-
-MeasTicThrd = uint32(0.1*gnssConfig.fs); % 设定观测量提取频率为10Hz
-if gnssConfig.div3==1,
- ncoNorm = 3*ncoNorm;
- MeasTicThrd = uint32(MeasTicThrd/3);
-end;
-MeasTicCounter = uint32(0);
-TakeMeasFlag = uint32(0);
-
-%% 计算每一次读取中频数据的长度, 目前默认一次读取50毫秒的中频数据
-if gnssConfig.FileFormat==1 % 如果是GPS+BDS模式
- BufferIfLength = ceil(50*gnssConfig.fs/2000); % 一个字节包含两个采样点
- if gnssConfig.div3==1,
- g_ifdat = uint8(zeros(1,ceil(BufferIfLength*2/3)+1000));
- b_ifdat = uint8(zeros(1,ceil(BufferIfLength*2/3)+1000));
- else
- g_ifdat = uint8(zeros(1,ceil(BufferIfLength*2)+1000));
- b_ifdat = uint8(zeros(1,ceil(BufferIfLength*2)+1000));
- end;
-else % 如果是单GPS模式
- BufferIfLength = ceil(50*gnssConfig.fs/4000); % 一个字节包含四个采样点
- if gnssConfig.div3==1,
- g_ifdat = uint8(zeros(1,ceil(BufferIfLength*4/3)+1000));
- b_ifdat = uint8(zeros(1,ceil(BufferIfLength*4/3)+1000));
- else
- g_ifdat = uint8(zeros(1,ceil(BufferIfLength*4)+1000));
- b_ifdat = uint8(zeros(1,ceil(BufferIfLength*4)+1000));
- end;
-end;
-
-%% 初始化物理常量
-PhyConstant.L1_freq = 1575.42E6;
-PhyConstant.B1_freq = 1561.098E6;
-PhyConstant.C = 2.99792458E8;
-PhyConstant.C_INV =3.33564095198152e-9;
-PhyConstant.L1_lambda = PhyConstant.C/PhyConstant.L1_freq;
-PhyConstant.B1_lambda = PhyConstant.C/PhyConstant.B1_freq;
-PhyConstant.PI = 3.141592653589793238;
-PhyConstant.F_RC = -4.442807633E-10; %相对论效应校正参数
-PhyConstant.GM = 3.986005e14;
-PhyConstant.OMEGAE84 = 7.2921151467e-5; % 地球自转角速度
-PhyConstant.WGS84_A = 6378137.0; %WGS84 地球半长轴
-PhyConstant.SEC_IN_WEEK = 604800; %周内秒计数总数
-PhyConstant.HalfSEC_IN_WEEK = 302400;%周内秒计数一半数
-
-%% 初始化GPS伪随机码
-for i=1:33,
- gpsPrnTbl(i,:) = GpsCodeGen(i);
-end;
-%% 初始化北斗伪随机码
-for i=1:33,
- bdPrnTbl(i,:) = BdCodeGen(i);
-end;
-
-
-%% 对GPS和北斗伪随机码进行重采样
- % GPS code case
-for i=1:2048,
- k=floor(i*1.023E6/2.048E6);
- for m=1:33
- gpsCode2048(m,i) = gpsPrnTbl(m,( mod(k,1023)+1 ) );
- end;
-end;
- % BD code case
-for i=1:4096,
- k=floor(i*2.046E6/4.096E6);
- for m=1:33,
- bdCode4096(m,i) = bdPrnTbl(m,( mod(k,2046)+1 ) );
- end;
-end;
-
-
-%% 初始化GPS和北斗卫星捕获跟踪状态
-for i=1:32,
- gpsSvStatus(i).state = 0;
- gpsSvStatus(i).doppler = 0;
- gpsSvStatus(i).code = 0;
-end;
-for i=1:14,
- bdSvStatus(i).state = 0;
- bdSvStatus(i).doppler = 0;
- bdSvStatus(i).code = 0;
- bdSvStatus(i).NHidx = 0;
-end;
-
-%% 初始化中频数据文件句柄
-ifFileHdle = -1;
-
-%% 初始化正弦、余弦表
-Carrier_I_tbl = [ 0, 6,11,15,16,15, 11, 6, 0, -6,-11,-15,-16,-15,-11,-6];
-Carrier_Q_tbl = [16,15,11, 6, 0,-6,-11,-15,-16,-15,-11, -6, 0, 6, 11,15];
-
-%% 初始化乘法结果表
-for i=1:128,
- cdIdx = bitget(i,7);
- smpIdx = bitand(bitshift(i,-4),3);
- phIdx = bitand(i,15);
- MuxTbl(2*i-1) = cdvalue(cdIdx+1)*bitmapvalue(smpIdx+1)*Carrier_I_tbl(phIdx+1);
- MuxTbl(2*i) = cdvalue(cdIdx+1)*bitmapvalue(smpIdx+1)*Carrier_Q_tbl(phIdx+1);
-end;
-halfChipPhaseStep = 2^30; % 0.5 chip spacing
-
-%% 初始化跟踪通道
-for i=1:24, % 24个跟踪通道
- ResetChannel(i);
-end;
-%% 初始化观测量
-measGnss.num = 0;
-measGnss.timetag = 0.0;
-measGnss.prn = zeros(1,24,'uint8');
-measGnss.gnssId = zeros(1,24,'uint8');
-measGnss.CN0 = zeros(1,24,'uint8');
-measGnss.pseudo_cd_ph = zeros(1,24);
-measGnss.doppler = zeros(1,24);
-%% 初始化本地时间和位置、速度
-localTime.accu = 0;
-localTime.second = 0.0;
-localTime.week =0;
-localTime.timetag = 0;
-
-localPosvel.pos = zeros(1,3);
-localPosvel.llh = zeros(1,3);
-localPosvel.dops = zeros(1,4);
-localPosvel.bias = 0;
-localPosvel.gbto = 0;
-localPosvel.vel = zeros(1,3);
-localPosvel.velENU = zeros(1,3);
-localPosvel.drift = 0;
-localPosvel.mode = uint8(0);
-localPosvel.valid = uint8(0);
-localPosvel.svnum = uint8(0);
-localPosvel.fixSvSet = uint32(0);
-localPosvel.fixSvSetBD = uint32(0);
-localPosvel.localT = 0;
-
-localPosvelKF.pos = zeros(1,3);
-localPosvelKF.llh = zeros(1,3);
-localPosvelKF.dops = zeros(1,4);
-localPosvelKF.bias = 0;
-localPosvelKF.gbto = 0;
-localPosvelKF.vel = zeros(1,3);
-localPosvelKF.velENU = zeros(1,3);
-localPosvelKF.drift = 0;
-localPosvelKF.mode = uint8(0);
-localPosvelKF.valid = uint8(0);
-localPosvelKF.svnum = uint8(0);
-localPosvelKF.fixSvSet = uint32(0);
-localPosvelKF.fixSvSetBD = uint32(0);
-localPosvelKF.localT = 0;
-
-%% 初始化卡尔曼滤波器
-kalmanFilter.state = 0; %初始化标志
-kalmanFilter.x = zeros(1,9);
-kalmanFilter.dx = zeros(1,9);
-kalmanFilter.P = zeros(9,9);
-kalmanFilter.phi = zeros(9,9);
-kalmanFilter.Q = zeros(9,9);
-kalmanFilter.measNum = 0;
-kalmanFilter.Hvec = zeros(24,3);
-kalmanFilter.measRange = zeros(1,24);
-kalmanFilter.measDoppler = zeros(1,24);
-kalmanFilter.Rrange = zeros(1,24);
-kalmanFilter.Rdoppler = zeros(1,24);
-kalmanFilter.localT = 0;
-kalmanFilter.gbto_init = 0;
-kalmanFilter.progagationTime = 0;
-kalmanFilter.lsinitState = 0;
-
-%% 初始化GPS 星历参数
-for k=1:32,
- GpsEph(k).valid = 0;
- GpsEph(k).health = uint8(255);
- GpsEph(k).toc = 0;
- GpsEph(k).toe = 0;
- GpsEph(k).dn = 0;
- GpsEph(k).cuc = 0;
- GpsEph(k).cus = 0;
- GpsEph(k).cic = 0;
- GpsEph(k).cis = 0;
- GpsEph(k).crc = 0;
- GpsEph(k).crs = 0;
- GpsEph(k).ety = 0;
- GpsEph(k).sqra = 0;
- GpsEph(k).ma = 0;
- GpsEph(k).w0 = 0;
- GpsEph(k).inc0 = 0;
- GpsEph(k).omega = 0;
- GpsEph(k).omegadot = 0;
- GpsEph(k).idot = 0;
- GpsEph(k).af0 = 0;
- GpsEph(k).af1 = 0;
- GpsEph(k).af2 = 0;
- GpsEph(k).tgd = 0;
- GpsEph(k).iodc = 0;
- GpsEph(k).iode = 0;
- GpsEph(k).iode2 = 0;
- GpsEph(k).tow = 0;
- GpsEph(k).ura = 0;
- GpsEph(k).week = 0;
-end;
-%初始化北斗星历数据
-for k=1:32,
- BdEph(k).valid = 0;
- BdEph(k).health = uint8(255);
- BdEph(k).toc = 0;
- BdEph(k).toe = 0;
- BdEph(k).dn = 0;
- BdEph(k).cuc = 0;
- BdEph(k).cus = 0;
- BdEph(k).cic = 0;
- BdEph(k).cis = 0;
- BdEph(k).crc = 0;
- BdEph(k).crs = 0;
- BdEph(k).ety = 0;
- BdEph(k).sqra = 0;
- BdEph(k).ma = 0;
- BdEph(k).w0 = 0;
- BdEph(k).inc0 = 0;
- BdEph(k).omega = 0;
- BdEph(k).omegadot = 0;
- BdEph(k).idot = 0;
- BdEph(k).af0 = 0;
- BdEph(k).af1 = 0;
- BdEph(k).af2 = 0;
- BdEph(k).tgd = 0;
- BdEph(k).tgd2 = 0;
- BdEph(k).iodc = 0;
- BdEph(k).iode = 0;
- BdEph(k).iode2 = 0;
- BdEph(k).tow = 0;
- BdEph(k).ura = 0;
- BdEph(k).week = 0;
-end;
-
-% MuxTbl = double(MuxTbl);
-% gpsPrnTbl = double(gpsPrnTbl);
-% bdPrnTbl = double(bdPrnTbl);
-```
-
-
-
-## 六、main_fig():主界面
-
-
-
-
-
-## 七、AcquisitionEngine():信号捕获
-
-执行流程:
-
-1. `global`全局变量
-2. 计算参与信号捕获的采样点数目
-3. 调用`DownSampling()`,完成降采样过程和串并转换过程,降采样到2.048MHz(GPS)或4.096MHz(BDS)
-4. for循环遍历GPS信号:
- * 遍历每一个跟踪通道,检测当前GPS信号是否被跟踪
- * 如果没有被跟踪,调用`AcquisitionByFFT()`利用FFT方法实现伪码相位纬度的并行搜索
- *
-
-
-
-
-
-
-
-
-
-
-
-
-
-## 八、AllocateTrackingChannel():分配跟踪通道
-
-
-
-
-
-
-
-
-
-## 九、SignalTracking():信号跟踪
-
-
-
-
-
-## 十、gnssPvt():伪距和多普勒PVT解算
-
-1.
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211PVT\350\247\243\347\256\227.md" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\272\214\357\274\211PVT\350\247\243\347\256\227.md"
deleted file mode 100644
index e69de29..0000000
diff --git "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\212\200\346\234\257\347\240\224\347\251\266\345\217\212\347\263\273\347\273\237\347\232\204\345\256\236\347\216\260_\346\235\216\345\255\237\346\201\222.pdf" "b/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\212\200\346\234\257\347\240\224\347\251\266\345\217\212\347\263\273\347\273\237\347\232\204\345\256\236\347\216\260_\346\235\216\345\255\237\346\201\222.pdf"
deleted file mode 100644
index a9929bc..0000000
Binary files "a/15-\345\214\227\346\226\227GPS\345\217\214\346\250\241\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\272\220\347\240\201\351\230\205\350\257\273/\345\214\227\346\226\227\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\346\212\200\346\234\257\347\240\224\347\251\266\345\217\212\347\263\273\347\273\237\347\232\204\345\256\236\347\216\260_\346\235\216\345\255\237\346\201\222.pdf" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232C\350\257\255\350\250\200\347\250\213\345\272\217\347\274\226\350\257\221\344\275\277\347\224\250.md" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232C\350\257\255\350\250\200\347\250\213\345\272\217\347\274\226\350\257\221\344\275\277\347\224\250.md"
deleted file mode 100644
index 82198e7..0000000
--- "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232C\350\257\255\350\250\200\347\250\213\345\272\217\347\274\226\350\257\221\344\275\277\347\224\250.md"
+++ /dev/null
@@ -1,170 +0,0 @@
-
-
-[TOC]
-
-## 一、编译
-
-
-
-
-
-
-
-## 二、pocket_acq:信号捕获
-
-```c
-pocket_aqc [-sig sig] [-prn prn[,...]] [-tint tint] [-toff toff]
- [-f freq] [-fi freq] [-d freq] [-nz] file
-```
-
-从数字中频信号中查找 GNSS 信号,并绘绘制出捕获结果。
-
-
-
-**命令行参数**:
-
-```c
--sig sig GNSS 信号类型 (L1CA, L2CM, ...)
--prn prn[,...] PRN 码,用英文逗号分隔,可以填单独 PRN 码,也可填 PRN 码范围 (1-32)
--tint tint 搜索 GNSS 的间隔 (ms) [code cycle]
--toff toff 中频信号起始位置 (ms) [0.0]
--f freq 中频信号采样频率 (MHz) [12.0]
--fi freq 中频信号频率 (MHz) [0.0]
--d freq 最大多普勒频移 (Hz) [5000.0]
--nz 信号捕获的相关结果阈值
--h 输出帮助信息:使用方式、信号 ID
-file 输入数字中频信号文件的路径,格式为连续的 int8_t,
- 可以存实采样(I),也可以存复采样(IQ)
-```
-
-
-
-
-
-## 三、pocket_trk:信号跟踪
-
-```c
-pocket_trk [-sig sig] [-prn prn[,...]] [-toff toff] [-f freq]
- [-fi freq] [-IQ] [-ti tint] [-log path] [-out path] [-q] [file]
-```
-
-
-
-**命令行参数**:
-
-```c
--sig sig GNSS 信号类型 (L1CA, L2CM, ...)
--prn prn[,...] [file]
--toff toff 中频信号起始位置 (ms) [0.0]
--f freq 中频信号采样频率 (MHz) [12.0]
--fi freq 中频信号频率 (MHz) [0.0]
--IQ
--ti tint 信号跟踪状态的更新间隔 (s) [0.05]
--log path 日志输出路径,记录导航电文解码信息、码偏差,路径要求如下:
- 1. 本地文件路径 (不含":"),可以包含通配符 (%Y, %m, %d, %h, %M)
- 2. TCP 服务端,需要端口号 [:port]
- 3. TCP 客户段,需要地址和端口号 [address:port]
--out path 输出数据流用来输出特殊信息,包括 UBX-RXM-QZSSL6 信息。
--q Suppress showing signal tracking status
-[file] 输入数字中频信号文件的路径,格式为连续的 int8_t,
- 可以存实采样(I),也可以存复采样(IQ)
-```
-
-
-
-
-
-
-
-## 四、pocket_scan:串口扫描
-
-```c
-pocket_scan [-e]
-```
-
-
-
-
-
-
-
-
-
-## 五、pocket_conf:射频前端配置
-
-```c
-pocket_conf [-s] [-a] [-h] [-p bus[,port]] [conf_file]
-```
-
-
-
-
-
-**命令行参数**:
-
-```c
--s 保存配置到射频前端的 EEPROM
--a
--h
--p [bus[,port]] USB 总线和端口号。
-conf_file
-```
-
-
-
-
-
-## 六、pocket_dump:射频前端采集数字中频信号
-
-```c
-pocket_dump [-t tsec] [-r] [-p bus[,port]] [-c conf_file] [-q]
- [file [file]]
-```
-
-
-
-
-
-
-
-**命令行参数**:
-
-```c
--t tsec 采集数据的时间 (s)
--r Dump raw SDR device data without channel separation and quantization.
--p bus[,port] USB 总线和端口号。
--c conf_file 配置文件。
--q Suppress showing data dump status.
-[file [file]] 输出中频信号文件路径,可以双通道输出两个文件。
- * 如果用了 -r 参数,那只会用第一个文件路径。
- * 如果文件路径传 "",不输出。
- * 如果文件路径传 -,输出到 stdout。
- 默认文件名:
- * ch1_YYYYMMDD_hhmmss.bin
- * ch2_YYYYMMDD_hhmmss.bin
-```
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232Python \350\204\232\346\234\254\344\275\277\347\224\250.md" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232Python \350\204\232\346\234\254\344\275\277\347\224\250.md"
deleted file mode 100644
index 5f56056..0000000
--- "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/00-PocketSDR\357\274\232Python \350\204\232\346\234\254\344\275\277\347\224\250.md"
+++ /dev/null
@@ -1,66 +0,0 @@
->
-
-[TOC]
-
-## 一、Python 环境配置
-
-
-
-
-
-## 二、pocket_psd.py:
-
-
-
-
-
-## 三、pocket_acq.py
-
-
-
-
-
-## 四、pocket_trk.py
-
-
-
-
-
-## 五、pocket_snap.py
-
-
-
-
-
-## 六、pocket_plot.py
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/01-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/01-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md"
deleted file mode 100644
index 6bafdb7..0000000
--- "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/01-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\347\250\213\345\272\217\347\256\200\344\273\213\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md"
+++ /dev/null
@@ -1,63 +0,0 @@
-> 原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
-
-[TOC]
-
-## 一、程序简介
-
-### 1、概述
-
-PocketSDR 是 RTKLIB 作者写的一款 GNSS 软件接收机,包含一个射频前端和一套后处理 GNSS 接收机程序(只支持后处理),实现了一整套完整的 GNSS 接收机功能,采用 C、Python 编写,支持几乎所有的 GNSS 信号(比商业接收机支持的还要多),目前 0.8 版本的程序支持的信号如下:
-
-* **GPS**: L1C/A, L1CP, L1CD, L2CM, L5I, L5Q,
-* **GLONASS**: L1C/A, L2C/A, L3OCD, L3OCP,
-* **Galileo**: E1B, E1C, E5aI, E5aQ, E5bI, E5bQ, E6B, E6C,
-* **QZSS**: L1C/A, L1C/B, L1CP,L1CD, L1S, L2CM, L5I, L5Q, L5SI, L5SQ, L6D, L6E,
-* **BeiDou**: B1I, B1CP, B1CD, B2I,B2aD, B2aP, B2bI, B3I,
-* **NavIC**: L5-SPS, SBAS: L1C/A, L5I, L5Q
-
-不同于 RTKLIB 等 GNSS 数据处理软件,PocketSDR 直接对 GNSS 信号进行处理,
-
-
-
-### 2、文件结构
-
-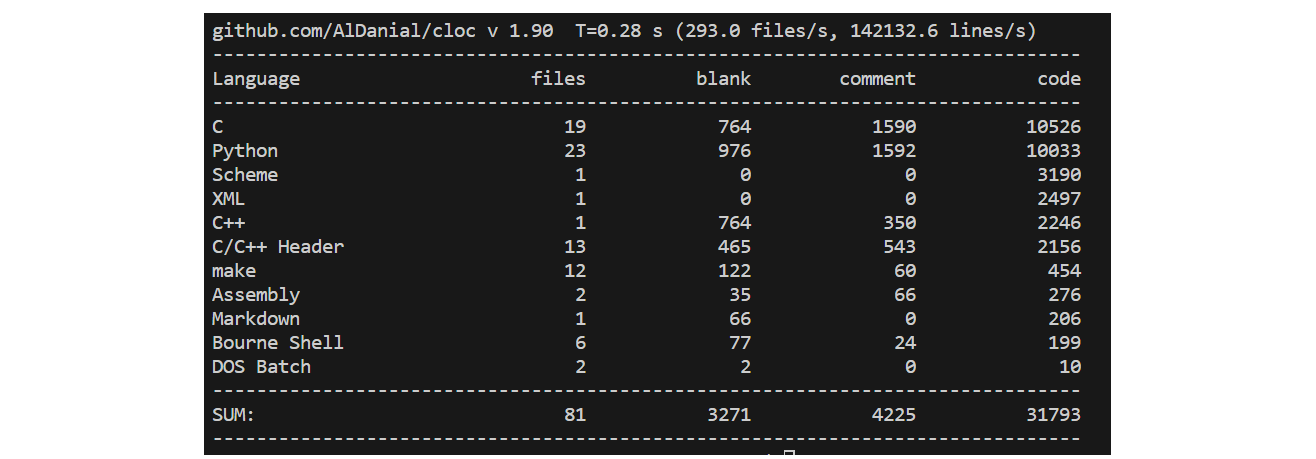 -
-### 3、射频前端
-
-
-
-### 3、射频前端
-
-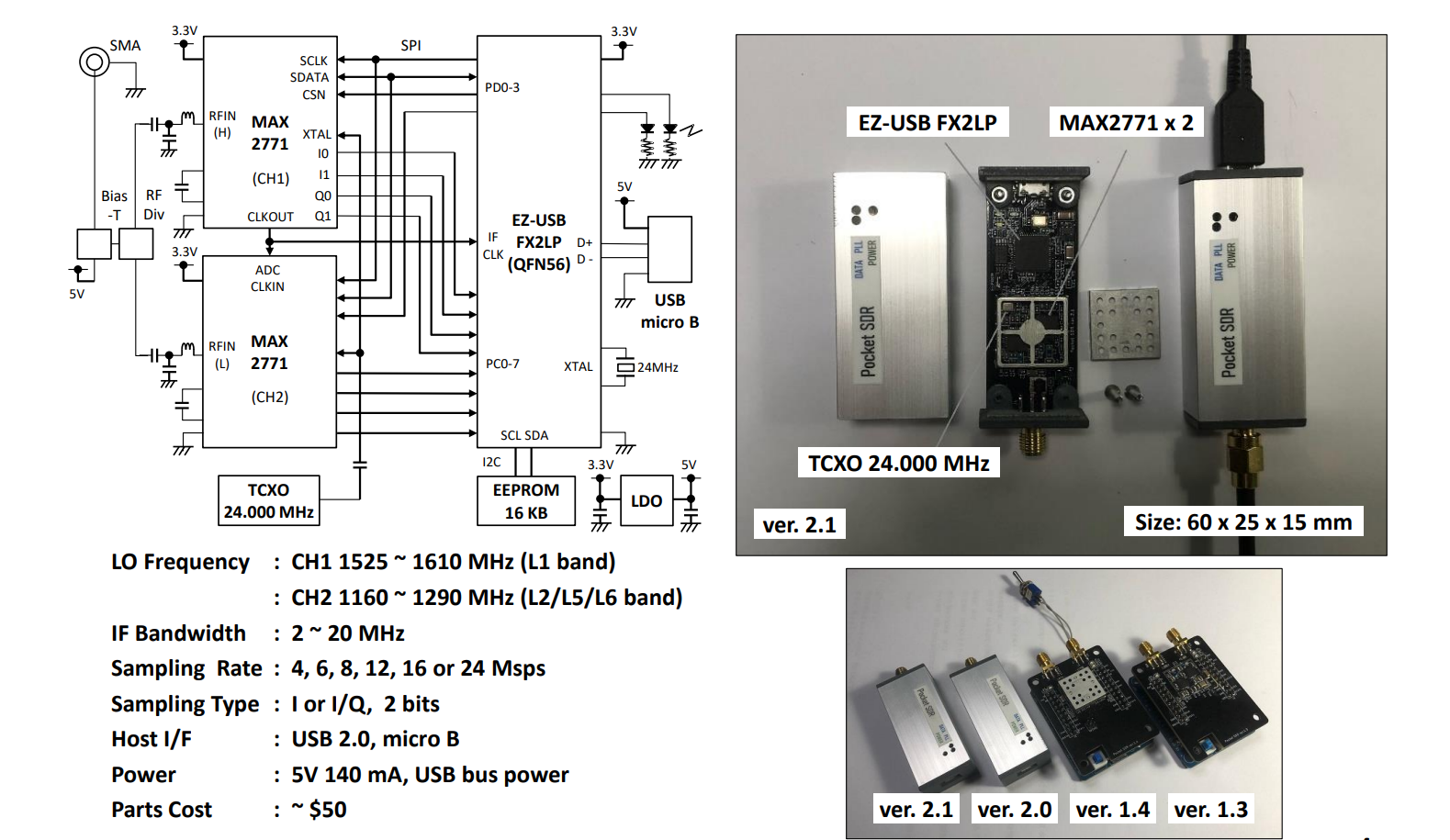 -
-
-
-
-
-
-
-## 二、编译调试
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/EZ-USB-FX2LP.pdf" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/EZ-USB-FX2LP.pdf"
deleted file mode 100644
index c43424e..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/EZ-USB-FX2LP.pdf" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/IPNTJ_NEXTWG_202202.pdf" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/IPNTJ_NEXTWG_202202.pdf"
deleted file mode 100644
index 2be550e..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/IPNTJ_NEXTWG_202202.pdf" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/MAX2771.pdf" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/MAX2771.pdf"
deleted file mode 100644
index 4c432f3..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/MAX2771.pdf" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/PocketSDR.xmind" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/PocketSDR.xmind"
deleted file mode 100644
index af2e3f5..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/PocketSDR.xmind" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/Visio \346\265\201\347\250\213\345\233\276/pocket_acq \345\207\275\346\225\260\350\260\203\347\224\250\345\205\263\347\263\273.vsdx" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/Visio \346\265\201\347\250\213\345\233\276/pocket_acq \345\207\275\346\225\260\350\260\203\347\224\250\345\205\263\347\263\273.vsdx"
deleted file mode 100644
index 660c6d0..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/Visio \346\265\201\347\250\213\345\233\276/pocket_acq \345\207\275\346\225\260\350\260\203\347\224\250\345\205\263\347\263\273.vsdx" and /dev/null differ
diff --git a/README.md b/README.md
index 8dfe509..dab4318 100644
--- a/README.md
+++ b/README.md
@@ -9,7 +9,6 @@
-
-
-
-
-
-
-
-## 二、编译调试
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/EZ-USB-FX2LP.pdf" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/EZ-USB-FX2LP.pdf"
deleted file mode 100644
index c43424e..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/EZ-USB-FX2LP.pdf" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/IPNTJ_NEXTWG_202202.pdf" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/IPNTJ_NEXTWG_202202.pdf"
deleted file mode 100644
index 2be550e..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/IPNTJ_NEXTWG_202202.pdf" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/MAX2771.pdf" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/MAX2771.pdf"
deleted file mode 100644
index 4c432f3..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/MAX2771.pdf" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/PocketSDR.xmind" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/PocketSDR.xmind"
deleted file mode 100644
index af2e3f5..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/PocketSDR.xmind" and /dev/null differ
diff --git "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/Visio \346\265\201\347\250\213\345\233\276/pocket_acq \345\207\275\346\225\260\350\260\203\347\224\250\345\205\263\347\263\273.vsdx" "b/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/Visio \346\265\201\347\250\213\345\233\276/pocket_acq \345\207\275\346\225\260\350\260\203\347\224\250\345\205\263\347\263\273.vsdx"
deleted file mode 100644
index 660c6d0..0000000
Binary files "a/16-PocketSDR\346\272\220\347\240\201\351\230\205\350\257\273/Visio \346\265\201\347\250\213\345\233\276/pocket_acq \345\207\275\346\225\260\350\260\203\347\224\250\345\205\263\347\263\273.vsdx" and /dev/null differ
diff --git a/README.md b/README.md
index 8dfe509..dab4318 100644
--- a/README.md
+++ b/README.md
@@ -9,7 +9,6 @@
🍀 把原始文档都放在这了,欢迎大家在我的基础上整理出属于自己的一套笔记;
💻 理解尚浅、实践甚少,列举的公式和理论仅供参考,千万不要照着我的公式写代码;
🛠 不建议直接就下载整个仓库,Markdown 和 PDF 可以在线看,想要的文件可以单独下载;
-⚙ 目前仓库还不够完善,部分文件还没啥内容,下载之前,建议先点开看看,有没有您期望的内容;
+⚙ 目前仓库还不够完善,部分文件还没啥内容,下载之前,建议先点开看看,有没有您期望的资料;
🎉 如果您觉得仓库内容有价值,推荐用 Github-Desktop 下载并保持更新,用 Typora 看 Markdown 文件;
🤺 【点击展开】欢迎随时与我交流:微信 (lizhengxiao99)、QQ (1482275402)、Email (dauger@126.com);
@@ -29,6 +28,7 @@
-  -
- |
-
- - 《泛化图学习与本科生科研经历分享》万冠呈 2024.05 - -- - -👉👉👉 点击跳转 👈👈👈 - |
-
 @@ -1146,6 +1123,8 @@
+
+
@@ -1146,6 +1123,8 @@
+
+
👆👆👆 回到开头 👆👆👆 @@ -1156,9 +1135,7 @@ - - -### 01-RTKLIB:最知名的 GNSS 数据处理 +### 01-RTKLIB:最知名的 GNSS 数据处理程序 RTKLIB 是全球导航卫星系统 GNSS 开源定位解算程序包,由日本东京海洋大学的高须知二(Tomoji Takasu)开发,由一个**核心程序库**和多个**命令行程序**、**界面程序**组成;代码规范、功能完善、可拓展性好。RTKLIB 功能很齐全,GNSS 数据处理所需的基本功能都有,支持的数据格式很多,既可以实时解算也可以后处理,既可以接自己的 GNSS 模块也可以连 IGS 的数据流,既可以解算自己采集的数据也可以算 IGS 测站的数据,既可以 RTK 也可以 PPP;许多 GNSS 导航定位程序开源程序都是基于 RTKLIB 二次开发衍生而来,适合作为 GNSS 入门学习的项目。它的项目结构如下所示: @@ -1223,33 +1200,28 @@ GAMP 全称 (**G**NSS **A**nalysis software for **M**ulti-constellation and mul 回到开头 👆👆👆 - - --- -### 03-PSINS:MATLAB-C++ 捷联惯导工具箱 -PSINS(**P**recise **S**trapdown **I**nertial **N**avigation **S**ystem 高精度捷联惯导系统算法)工具箱由西北工业大学自动化学院惯性技术教研室严恭敏老师开发和维护。工具箱分为Matlab和C++两部分。主要应用于**捷联惯导**系统的数据处理和算法验证开发,它包括**惯性传感器数据分析**、**惯组标定**、**初始对准**、**惯导AVP**(姿态-速度-位置)更新解算、**组合导航**Kalman滤波等功能。C++部分采用 VC6 编写,可以用于嵌入式开发。 - +### 03-GAMP-GOOD:基于 Wget 的 GNSS 数据下载程序
-> 推荐视频:[严恭敏-PSINS导航工具箱入门与详解](https://www.bilibili.com/video/BV1R54y1E7ut)
->
-> 推荐视频:[严恭敏-PSINS开发板介绍](https://www.bilibili.com/video/BV1z3411a7xe)
+GAMP-GOOD 由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt界面可执行程序 Good_Gui 三部分组成,自2021年4月1.0版本至今已历经 15 个版本迭代,目前已实现常用 GNSS 观测值、广播星历、精密卫星轨道和钟差(实时、超快、快速、最终)、地球定向参数、卫星姿态ORBEX、DCB/DSB/OSB、SINEX周解、电离层和对流层延迟产品、天线相位中心等产品下载。
+
+
+### 03-GAMP-GOOD:基于 Wget 的 GNSS 数据下载程序
-> 推荐视频:[严恭敏-PSINS导航工具箱入门与详解](https://www.bilibili.com/video/BV1R54y1E7ut)
->
-> 推荐视频:[严恭敏-PSINS开发板介绍](https://www.bilibili.com/video/BV1z3411a7xe)
+GAMP-GOOD 由核心代码库 Libgood、命令行可执行程序 Good_Cui 和 Qt界面可执行程序 Good_Gui 三部分组成,自2021年4月1.0版本至今已历经 15 个版本迭代,目前已实现常用 GNSS 观测值、广播星历、精密卫星轨道和钟差(实时、超快、快速、最终)、地球定向参数、卫星姿态ORBEX、DCB/DSB/OSB、SINEX周解、电离层和对流层延迟产品、天线相位中心等产品下载。
+
+
👆👆👆 - 转到源码解读 + 转到介绍 or - 转到项目地址 + 转到项目地址 or 回到开头 👆👆👆 - --- ### 04-Ginan:澳大利亚 PPP 定位/定轨程序 @@ -1278,7 +1250,7 @@ PEA 用 C++、POD 部分用 Fortune,绘图和批处理脚本用 Python👆👆👆 - 转到源码解读 + 转到源码解读 or 转到项目地址 or @@ -1286,60 +1258,9 @@ PEA 用 C++、POD 部分用 Fortune,绘图和批处理脚本用 Python 👆👆👆 - ---- - -### 05-goGPS:MATLAB-GNSS 数据处理 - -**goGPS**是一个处理GNSS原始数据的软件,最初支持单频低成本GPS接收机数据,但现在也可以用来处理多频多系统GNSS数据。它实现了多种算法来解算,目前包括两个主要的最小二乘法(LS)引擎:一个基于于组合观测数据(例如无电离层观测);另一个能够使用所有的频率和记录的信号数据,而不进行任何组合(电离层延迟是正常方程的参数)。组合和不组合的引擎都支持PPP、NET解算。目前只支持静态测站的解算,还不能动态解算。 - -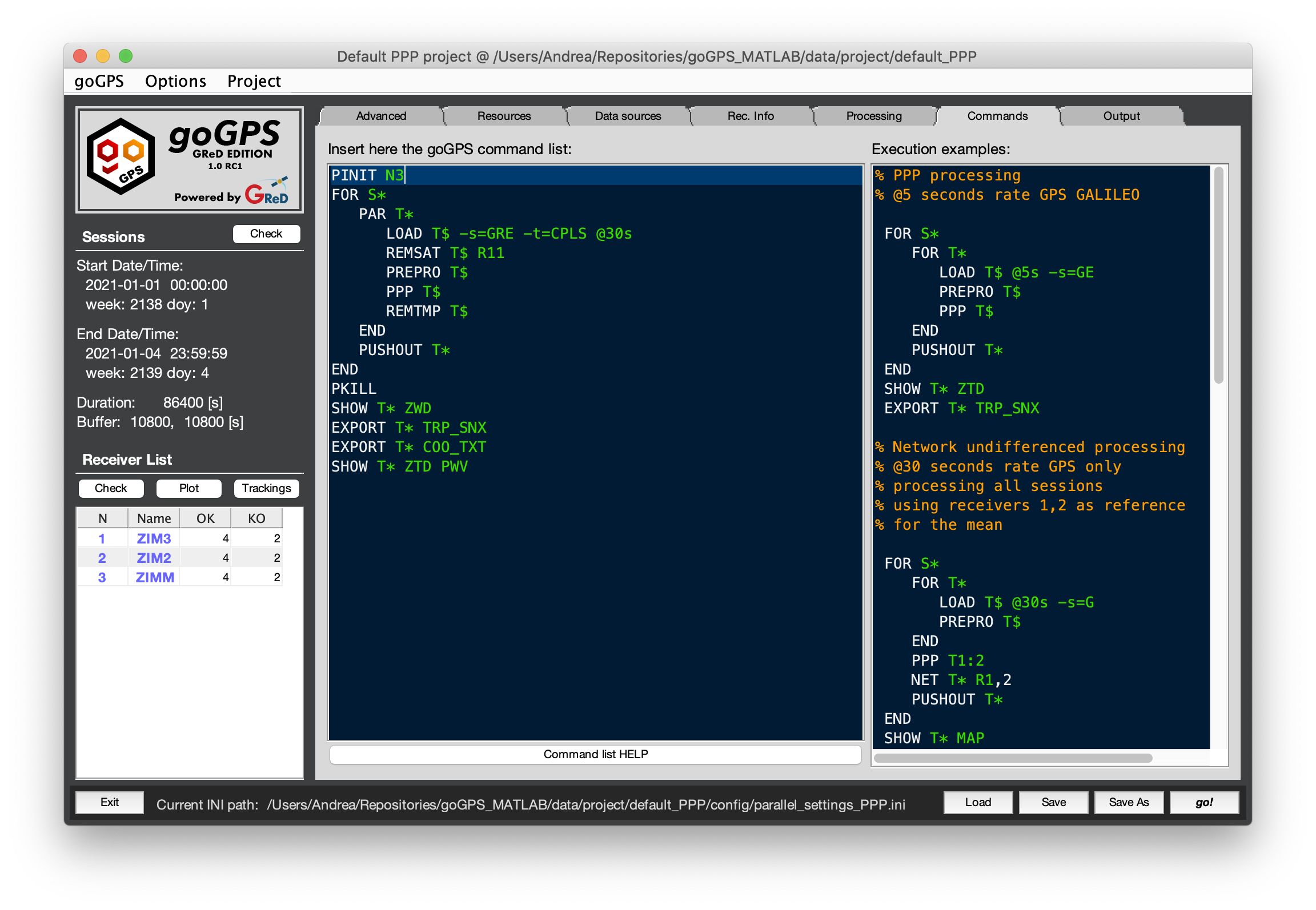 -
-
-
-- 👆👆👆 - 转到源码解读 - or - 转到项目地址 - or - 回到开头 - 👆👆👆 - - - ---- - -### 06-GICI-LIB:GNSS+INS+Camera 图优化融合定位 - -GICI-LIB 全称 **G**NSS/**I**NS/**C**amera **I**ntegrated Navigation Library,是上海交大最新开源的一套基于图优化的 GNSS+INS+Camera 集成导航定位库。基于 RTKLIB 处理 I/O 流、编解码;基于 OKVIS 因子图优化类型封装;基于 SVO 做特征提取。以 GNSS 为主,再加入 INS、Camera 做组合,支持相当多的数据格式、定位模式,包含很多 GNSS 因子、惯导因子、视觉因子及运动约束。以处理实时数据为主,后处理也采用模拟实时数据处理的方式进行。 - -- **论文**:[GICI-LIB: A GNSS/INS/Camera Integrated Navigation Library](https://arxiv.org/abs/2306.13268),可以[在这](https://arxiv.org/pdf/2306.13268.pdf)下载 -- **源码**:[https://github.com/chichengcn/gici-open](https://github.com/chichengcn/gici-open) -- **数据**:[https://github.com/chichengcn/gici-open-dataset](https://github.com/chichengcn/gici-open-dataset) - -典型应用方式如下图: - - -
-包含以下估计器:
-
-
-
-包含以下估计器:
-
-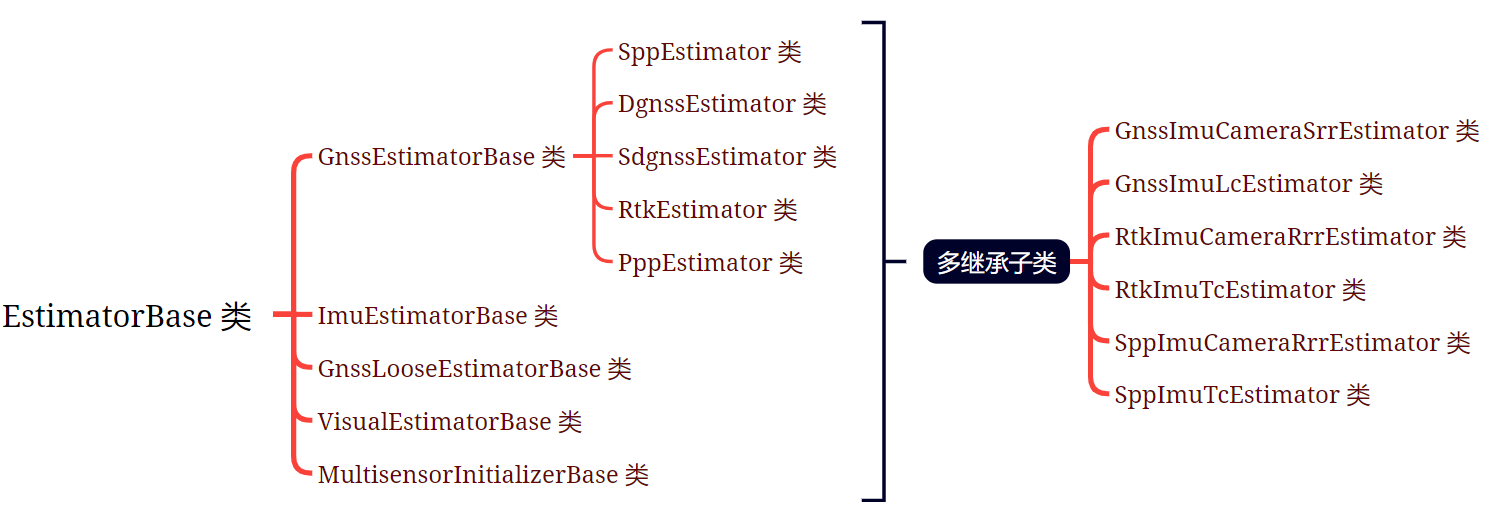 -
-> 补充:GICI 还在持续更新,前段时间看作者还准备加 PPP/IMU/Camera 紧组合模式。
-
-
-
-> 补充:GICI 还在持续更新,前段时间看作者还准备加 PPP/IMU/Camera 紧组合模式。
-
-- 👆👆👆 - 转到源码解读 - or - 转到项目地址 - or - 回到开头 - 👆👆👆 - - - --- -### 07-SoftGSS:MATLAB GPS L1-C/A 码软件接收机 +### 05-SoftGSS:MATLAB GPS L1-C/A 码软件接收机 SoftGNSS 是《软件定义的GPS和伽利略接收机》附带的程序,MATLAB 编写,实现了一套最简单的 GNSS 软件接收机功;输入经过天线接收,射频前端滤波下变频后的数字中频信号文件,进行 GPS L1 C/A 码的捕获跟踪,生成伪距观测值,解译导航电文,最小二乘定位解算;代码量很小也很简单,适合作为 GNSS 基带数字信号处理的入门阅读程序。主要执行流程如下: @@ -1347,7 +1268,7 @@ SoftGNSS 是《软件定义的GPS和伽利略接收机》附带的程序,MATLA👆👆👆 - 转到源码解读 + 转到源码解读 or 转到项目地址 or @@ -1355,100 +1276,55 @@ SoftGNSS 是《软件定义的GPS和伽利略接收机》附带的程序,MATLA 👆👆👆 - ---- - -### 08-VINS:光流法视觉惯性 SLAM - -与双目相机和 RGB-D 相机相比,单目相机具有结构简单、成本低和处理速度快的优点。然而,单目 VSLAM 存在尺度不确定性、无法对齐位姿和重力方向的自身缺点和快速运动导致的运动模糊的环境下容易跟踪丢失等不足。为弥补此问题,可将单目相机和 IMU 相结合的传感器融合,这种融合方案被称为单目视觉惯性里程计(Visual Inertial Odometry,VIO)或单目视觉惯性 SLAM(Visual-inertial SLAM,VINS)。 - -* IMU 也可以弥补视觉 SLAM 在短时间、快速运动上的不足,另外由于 IMU 不依赖外界环境信息,对环境变化不敏感,也可以在少纹理、明暗变化较大或者光线较弱场景内提供短期的定位方案以及位姿估计方案。 - -* 较之惯性信息,视觉里程计可以提供丰富的外界信息,在低速平稳的运动中位姿估计稳定,而且视觉里程计在长时间运行后的漂移较小,并且可以通过回环检测修正自身位置以减小累积误差。 - -香港科技大学沈劭劼团队开发的 VINS 系统,用了一种紧耦合的非线性优化方法。该团队在 2017 年发布的 VINS-Mono 通过在四元数上进行 IMU 的预积分,并且采用滑动窗口法融合 IMU 信息和相机观测到的特征数据,实现了数据的紧耦合。并且采用四自由度的图优化方法实现了回环检测模块,来得到全局约束。在 2019 年,该团队又发布了 VINS-Fusion,在 VINS-Mono 的基础上又加入了双目、双目+IMU 等更多的传感器类型,以及支持了 VINS 和 GPS 的融合。它支持在线标定相机及 IMU 参数及鱼眼相机模型,并且支持保存当前地图和加载过往地图。在与 IMU 的结合上,它采用了四元数积分方案,与视觉信息进行紧耦合,具有很强的鲁棒性和定位精度。 - -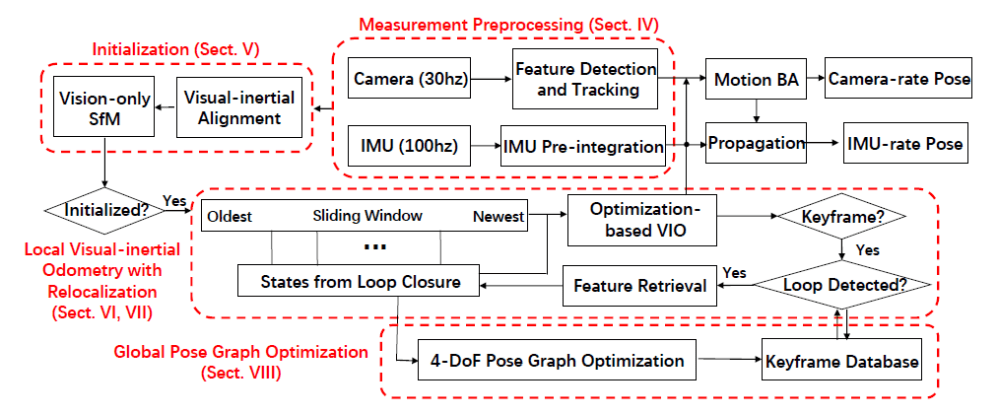 -
-
-
-- 👆👆👆 - 转到源码解读 - or - 转到项目地址 - or - 回到开头 - 👆👆👆 - - - --- -### 09-ORB-SLAM3:特征点法视觉惯性图优化 SLAM +### 06-PSINS:MATLAB-C++ 捷联惯导工具箱 -ORB 指 **O**riented FAST and **r**otated **B**RIEF,是一种结合 FAST 和 BRIEF,并引入旋转不变性的一种特征点和描述子;SLAM 指 **S**imultaneous **L**ocalization **a**nd **M**apping,指的是同时进行实时定位和地图构建。 +PSINS(**P**recise **S**trapdown **I**nertial **N**avigation **S**ystem 高精度捷联惯导系统算法)工具箱由西北工业大学自动化学院惯性技术教研室严恭敏老师开发和维护。工具箱分为Matlab和C++两部分。主要应用于**捷联惯导**系统的数据处理和算法验证开发,它包括**惯性传感器数据分析**、**惯组标定**、**初始对准**、**惯导AVP**(姿态-速度-位置)更新解算、**组合导航**Kalman滤波等功能。C++部分采用 VC6 编写,可以用于嵌入式开发。 -ORB-SLAM3 是**迄今为止,最完整的视觉惯性 SLAM 系统系统**,它是第一个集成了单目相机、双目相机、RGB-D相机,以及单目相机结合 IMU、双目相机结合 IMU 的 SLAM 系统。并且在 ORB-SLAM2 的基础上,改进了相机模型,使其不再局限于传统的小孔成像模型,而是可以**扩展到鱼眼模型**。在与 IMU 的结合上,它根据运动模型在流形上进行 **IMU 的预积分**的方式,然后采用非线性优化的思想,**将 IMU 的预积分结果和视觉 SLAM 的重投影模型一同进行图优化,使得预积分残差以及重投影误差共同达到最小**,以此来完成视觉信息和惯导系统的**紧耦合**。并且它采用了更为快速的**初始化**方法,以及丢失跟踪后利用惯导系统快速**重定位**方法。此外,它还采用**地图集**的方式,实现了对大场景的定位建图。这也是如今众多开源方案中,功能最强大、最精准的方法。系统框图如下: +
-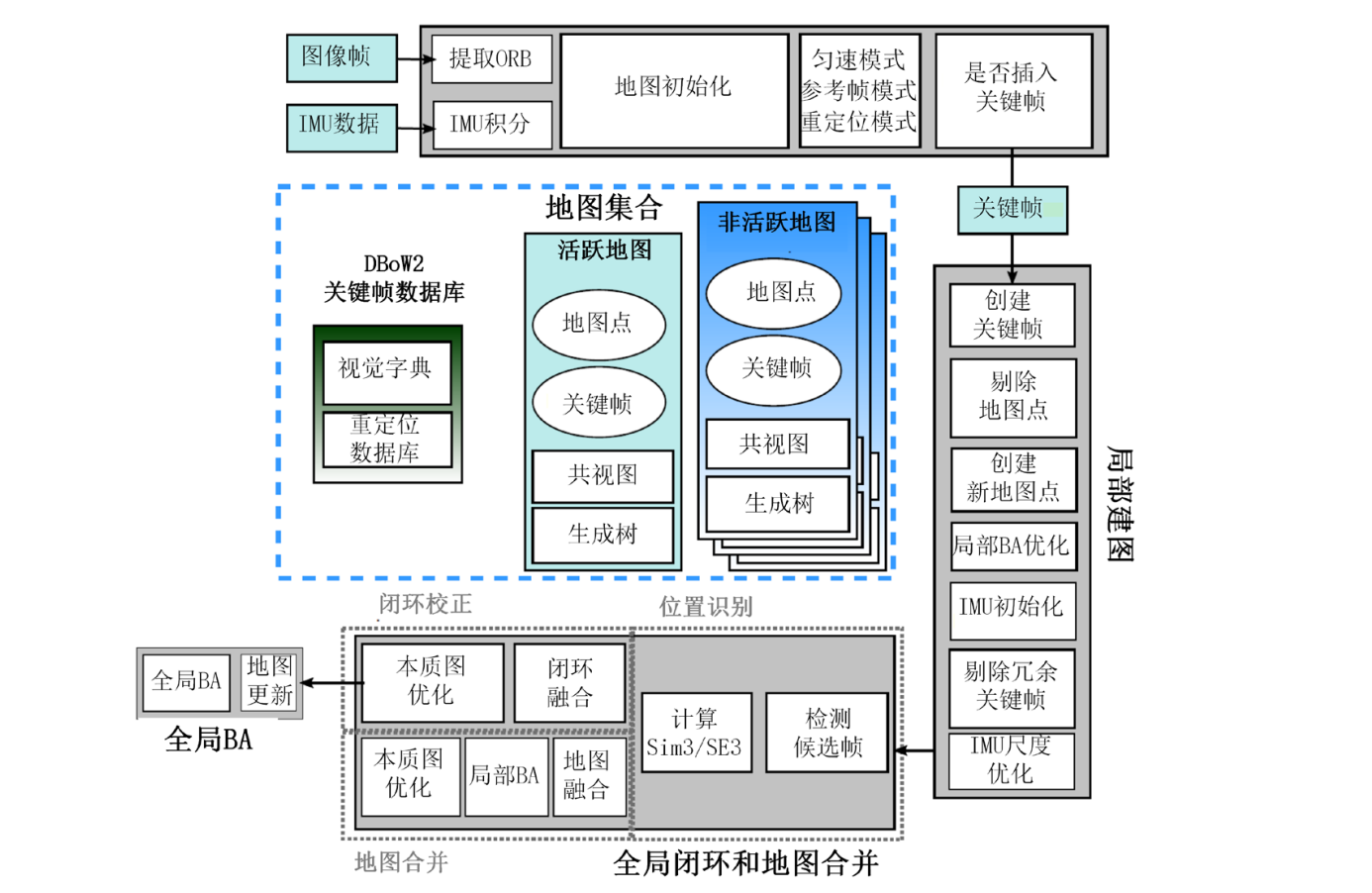 +> 推荐视频:[严恭敏-PSINS导航工具箱入门与详解](https://www.bilibili.com/video/BV1R54y1E7ut)
+>
+> 推荐视频:[严恭敏-PSINS开发板介绍](https://www.bilibili.com/video/BV1z3411a7xe)
+> 推荐视频:[严恭敏-PSINS导航工具箱入门与详解](https://www.bilibili.com/video/BV1R54y1E7ut)
+>
+> 推荐视频:[严恭敏-PSINS开发板介绍](https://www.bilibili.com/video/BV1z3411a7xe)
👆👆👆 - 转到源码解读 + 转到源码解读 or - 转到项目地址 + 转到项目地址 or 回到开头 👆👆👆 - --- -### 10-GNSS-SDR:基于 GNURadio 的 GNSS 软件接收机 - -GNSS-SDR(**GNSS:** **G**lobal **N**avigation **S**atellite **S**ystems、**SDR:** **S**oftware **D**efined **R**eceiver),在 GitHub 上搜索 “GNSS” 排第一的仓库,收藏量也高达 1.3k。与上面列举的 RTKLIB、GAMP 等 GNSS 数据处理软件不同,GNSS-SDR 直接对信号进行处理,是一个用 C++ 实现的 GNSS 软件接收机开源项目。有了 GNSS-SDR,用户可以通过创建一个图来构建 GNSS 软件接收器,图中的节点是信号处理块,线条代表它们之间的数据流。该软件为不同的合适射频前端提供接口,并实现从接收器一直到 PVT 解算的所有功能。它的设计允许任何形式的定制,包括信号源、信号处理算法、与其他系统的互操作性、输出格式的互换,并为所有中间信号、参数和变量提供接口。 - -软件旨在促进新信号处理技术的发展,提供一种简便的方法来衡量这些技术对接收机整体性能的影响。通过对每个软件模块进行系统功能验证,以及使用真实和合成信号对整个接收机进行实验验证,对所有流程进行测试。 - -目前的技术仍无法以卫星发射频率(约 1.5 GHz)对信号进行数字处理,因此我们仍需要一个射频前端,将信号降频到较低频率,在此过程中进行一些滤波和放大,并以一定的速率进行采样,将量化的数字原始采样流传输到计算平台(通过 USB、以太网等)。 - -软件接收机可在普通的 PC 中运行,并通过 USB 和以太网总线为各种市售或定制的射频前端提供接口,使处理算法适应不同的采样频率、中间频率和采样分辨率。它还可以处理存储在文件中的原始数据样本。软件对可用的卫星信号进行信号采集和跟踪,对导航信息进行解码,并计算定位算法所需的观测值,最终实现完整导航解决方案。处理输出可存储在 RINEX 文件中,或通过 TCP/IP 服务器以 RTCM 3.2 消息形式实时传输。导航结果以 KML 和 GeoJSON 格式存储。 - -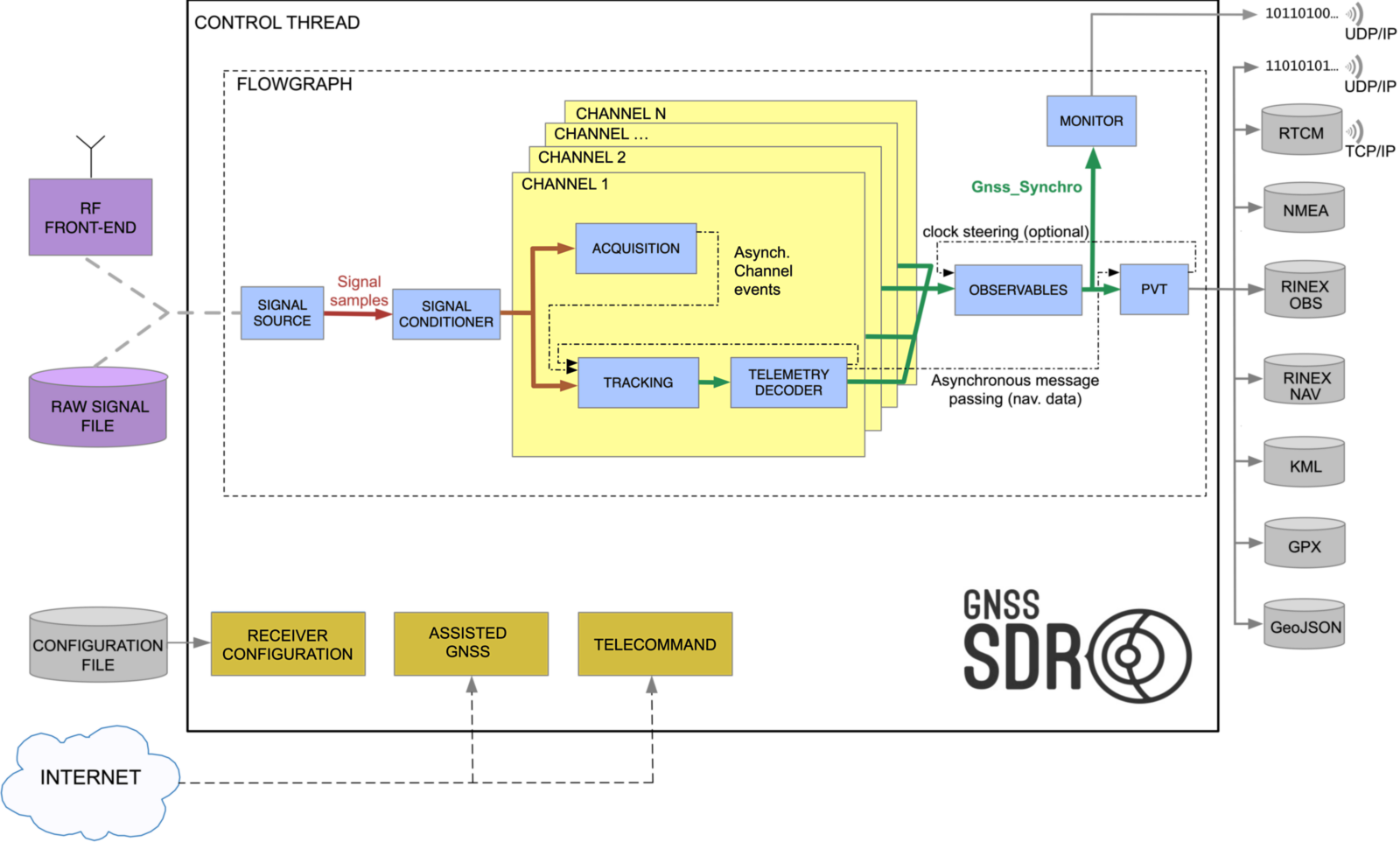 -
-
-
-- 👆👆👆 - 转到源码解读 - or - 转到项目地址 - or - 回到开头 - 👆👆👆 - - - ---- +### 07-GINAV:GNSS-INS Matlab 工具箱 -### 11-TGINS:基于 RTKLIB 的 GNSS/INS-EKF 紧组合 +GINav 是 2020 年发布在 GPS Solution 上开源 GNSS/INS 紧组合工具箱,支持多模多频(单频到三频)GNSS 数据处理,支持多种处理模式 ,包括 SPP、PPD、PPK、PPS GNSS/INS 组合导航算法开发与测试。软件采用纯 MATLAB 编写,src 目录下共 325 个 .m 文件,约 12000 行代码;GNSS 部分的代码是移植 RTKLIB 和 GAMP,IMU 递推算法移植自 PSINS,使用过 RTKLIB 的朋友应该很容易就能上手。 +与 RTKLIB、Ginan、IGNav 等 C/C++ 编写的导航定位解算程序相比,MATLAB 编写的 GINav 可移植性更差,执行效率低,PPK 解算比 RTKLIB 慢 20 倍;GINav 的优点是简单,调试方便,在变量区可以直接看到矩阵的值,MATLAB 提供的数据处理和分析功能更丰富,方便进行算法的学习和研究。 +与同为 MATLAB 实现的 PSINS 捷联惯导工具箱相比,GINav 更侧重 GNSS 和紧组合算法,实现的惯导和滤波算法远没有 PSINS 丰富。与同为 MATLAB 实现的 goGPS 相比,GINav 的源码和软件使用方式都更简单,采用纯面向过程风格,很多的结构体和函数都与 RTKLIB 和 GAMP 一致,更容易上手。 +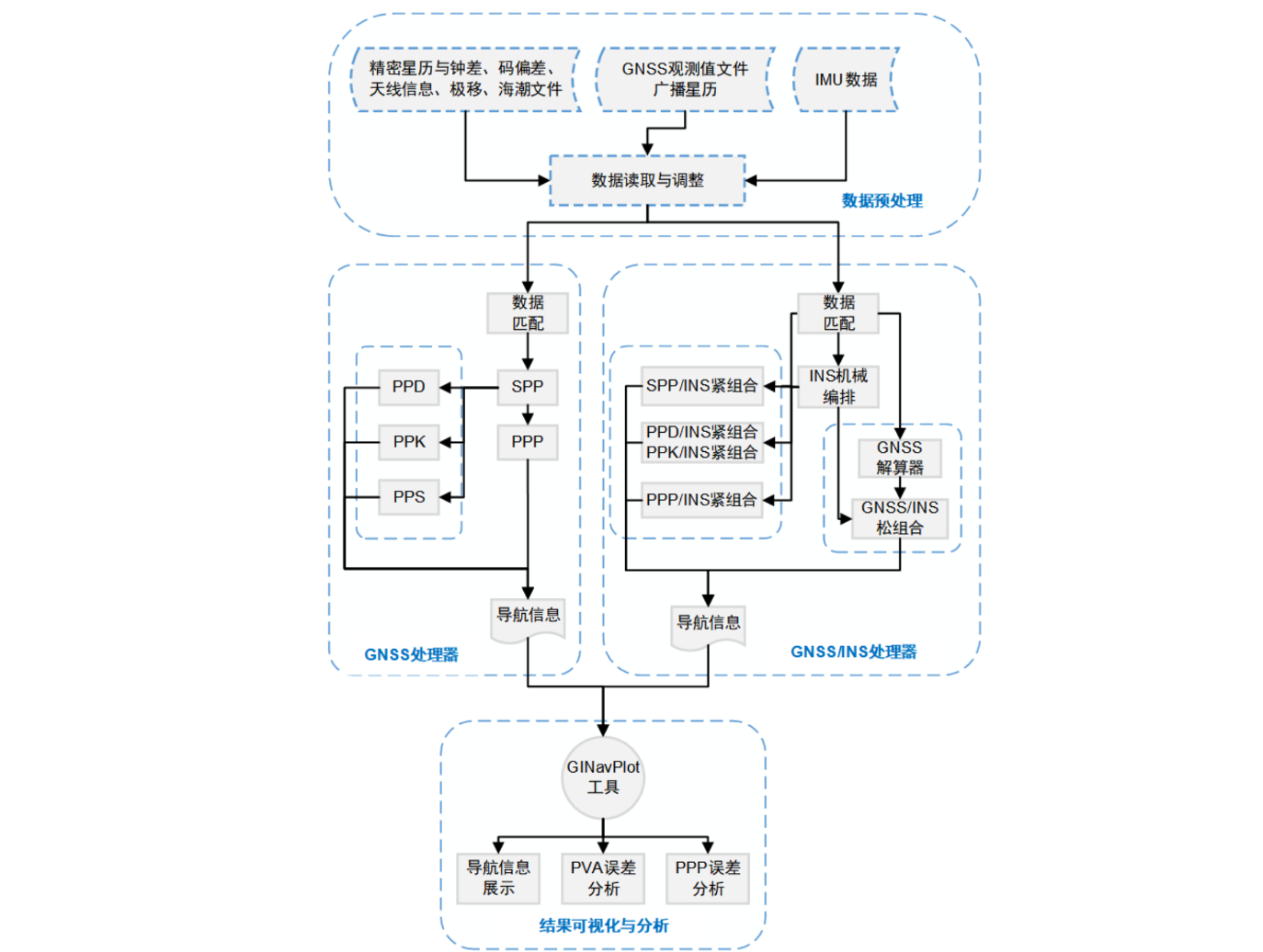 +> 推荐阅读:[MJy65535:GINav 学习笔记](https://blog.csdn.net/MJy65535/article/details/130030063)👆👆👆 - 转到源码解读 + 转到源码解读 or - 转到项目地址 + 转到项目地址 or 回到开头 👆👆👆 - --- -### 12-KF-GINS:GNSS/INS-EKF 松组合 Demo +### 08-KF-GINS:GNSS/INS-EKF 松组合例程 KF-GINS 是武大 i2Nav 实验室开源的一套松组合导航程序;可以读取 IMU 数据文件、GNSS 结果文件,进行松组合解算,计算位置、速度、姿态、陀螺仪零偏、加速度计零偏、陀螺仪比例、加速度计比力,共 21 维状态向量。代码量小,有详细的文档、注释和讲解,代码结构很好理解,有一些可以学习的工程技巧。 @@ -1461,7 +1337,7 @@ KF-GINS 是武大 i2Nav 实验室开源的一套松组合导航程序;可以👆👆👆 - 转到源码解读 + 转到源码解读 or 转到项目地址 or @@ -1469,10 +1345,9 @@ KF-GINS 是武大 i2Nav 实验室开源的一套松组合导航程序;可以 👆👆👆 - --- -### 13-OB-GINS:GNSS/INS-FGO 松组合 Demo +### 09-OB-GINS:GNSS/INS-FGO 松组合 Demo 武大 I2NAV 开源,基于图优化的 IMU/GNSS 松组合解算,IMU 预积分算法相比以视觉为主的 ORB-SLAM3、VINS 要精细一些。 @@ -1488,7 +1363,7 @@ KF-GINS 是武大 i2Nav 实验室开源的一套松组合导航程序;可以👆👆👆 - 转到源码解读 + 转到源码解读 or 转到项目地址 or @@ -1496,119 +1371,117 @@ KF-GINS 是武大 i2Nav 实验室开源的一套松组合导航程序;可以 👆👆👆 - --- -### 14-ROS导航功能包:自主导航机器人定位/建图/路径规划 +### 10-POSGO:图优化 GNSS 伪距定位 -功能简单来说,就是根据输入的里程计等传感器的信息流和机器人的全局位置,通过导航算法,计算得出安全可靠的机器人速度控制指令。广泛用在一些对可靠性要求没那么高的自主导航机器人场景中,比如扫地机器人、物流机器人等。 +POSGO,全称 POSition based on Graph Optimization,是由武汉大学 GNSS 定轨中心李政开源的一套图优化 GNSS 伪距定位程序。该程序目前主要侧重于以伪距为核心的 SPP(单点定位)和 RTD(实时伪距差分定位)解算,并兼容 EKF(扩展卡尔曼滤波器)和 GO(图优化)解算方法。整个项目涵盖了约 8000行的 C++ 代码和 700 行的 Python 脚本,C++ 部分的代码在 RTKLIB 的基础上,进行了面向对象的改编和优化;Python 部分则包含了 Analyze 和 AnalyzeStatic 两个结果分析脚本。POSGO 使用了来自城市道路的动态车辆手机实验数据进行测试。实验结果显示,在遮挡严重的区域,GO解算方法相较于传统的 LS(最小二乘法)和 EKF 解算方法,展现出了更高的定位精度和更强的稳健性。POSGO 未来计划引入对载波相位的支持,以进一步提升定位的精准度,并计划加入对多传感器融合的支持。 + +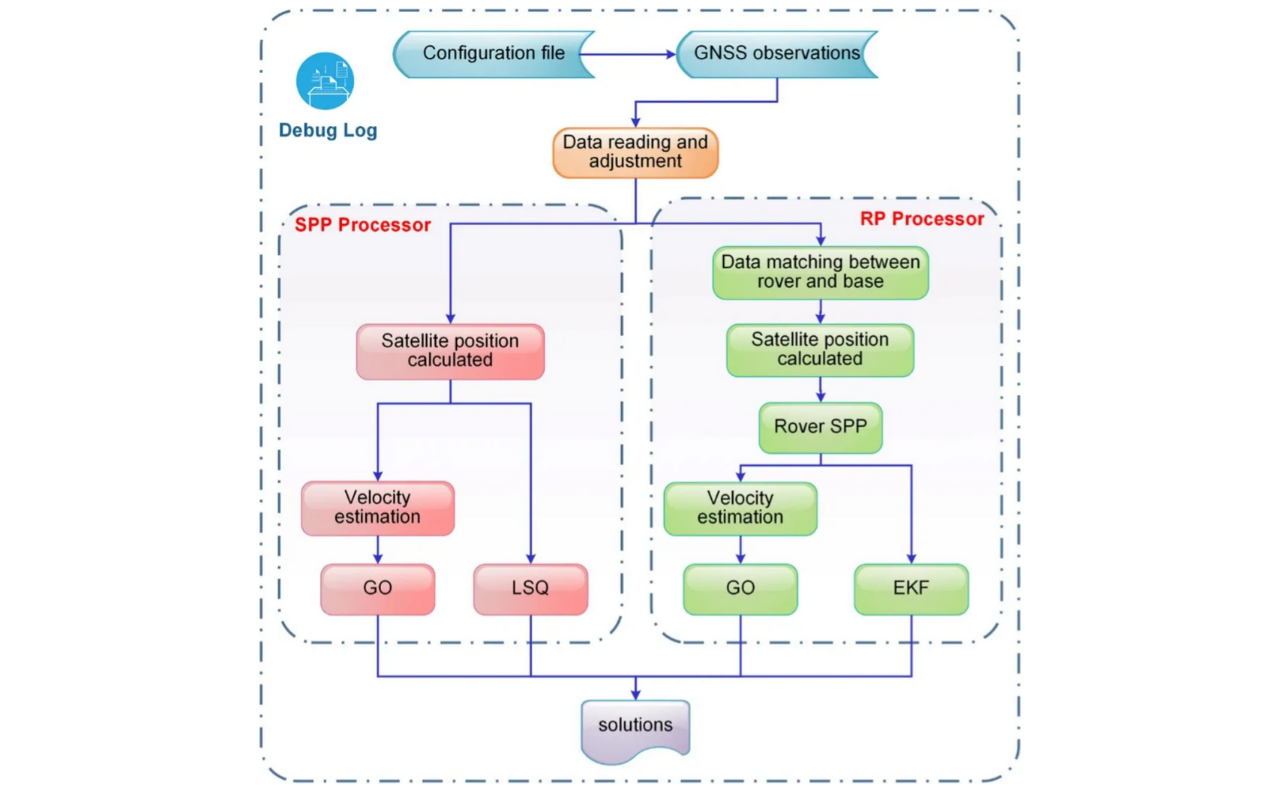 -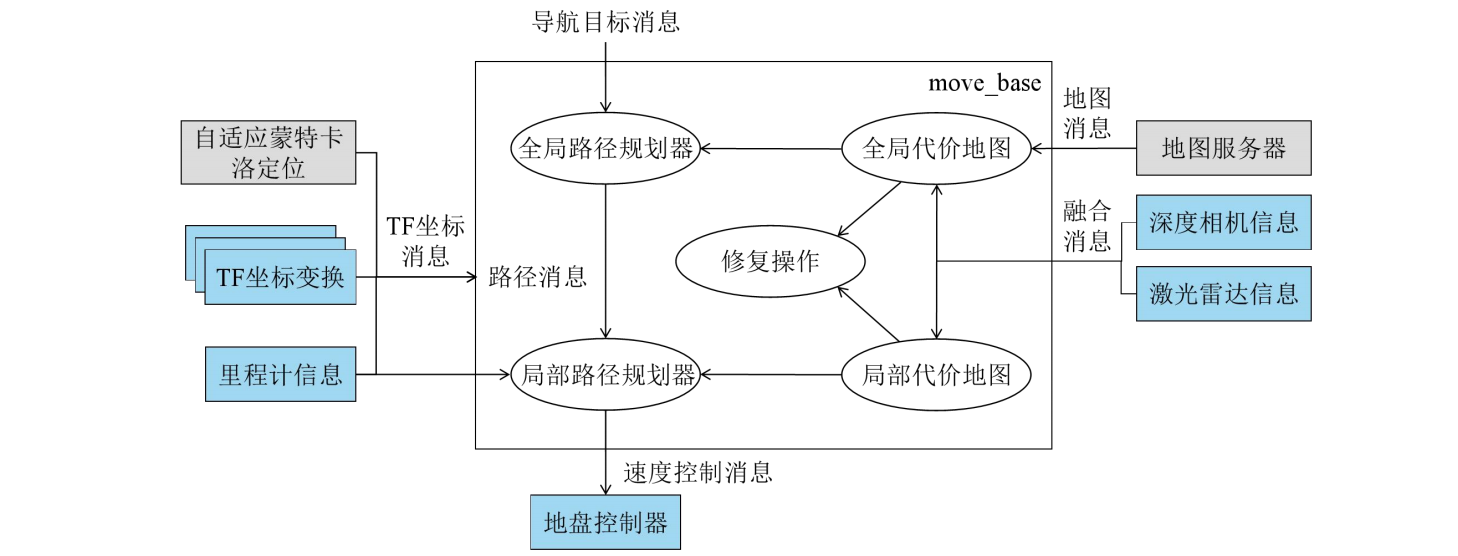 -
-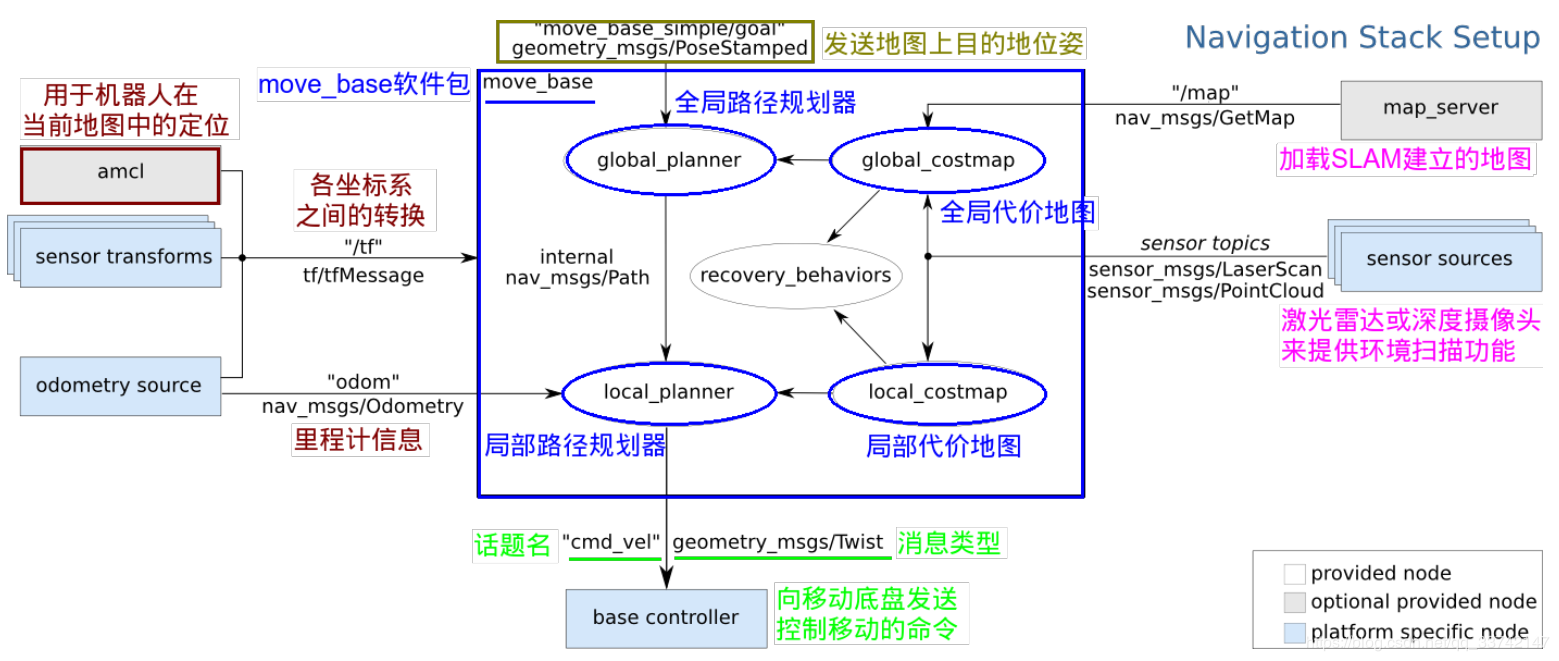
👆👆👆 - 转到源码解读 + 转到源码解读 or - 转到项目地址 + 转到项目地址 or 回到开头 👆👆👆 - --- -### 15-北斗GPS双模软件接收机:GPS-L1/BDS-B1 软件接收机 +### 11-GICI-LIB:GNSS+INS+Camera 图优化融合定位 + +GICI-LIB 全称 **G**NSS/**I**NS/**C**amera **I**ntegrated Navigation Library,是上海交大最新开源的一套基于图优化的 GNSS+INS+Camera 集成导航定位库。基于 RTKLIB 处理 I/O 流、编解码;基于 OKVIS 因子图优化类型封装;基于 SVO 做特征提取。以 GNSS 为主,再加入 INS、Camera 做组合,支持相当多的数据格式、定位模式,包含很多 GNSS 因子、惯导因子、视觉因子及运动约束。以处理实时数据为主,后处理也采用模拟实时数据处理的方式进行。 + +- **论文**:[GICI-LIB: A GNSS/INS/Camera Integrated Navigation Library](https://arxiv.org/abs/2306.13268),可以[在这](https://arxiv.org/pdf/2306.13268.pdf)下载 +- **源码**:[https://github.com/chichengcn/gici-open](https://github.com/chichengcn/gici-open) +- **数据**:[https://github.com/chichengcn/gici-open-dataset](https://github.com/chichengcn/gici-open-dataset) -《北斗GPS双模软件接收机》书配套程序,MATLAB 编写,程序运行相当耗时,70s 的示例程序要算几个小时。 +典型应用方式如下图: -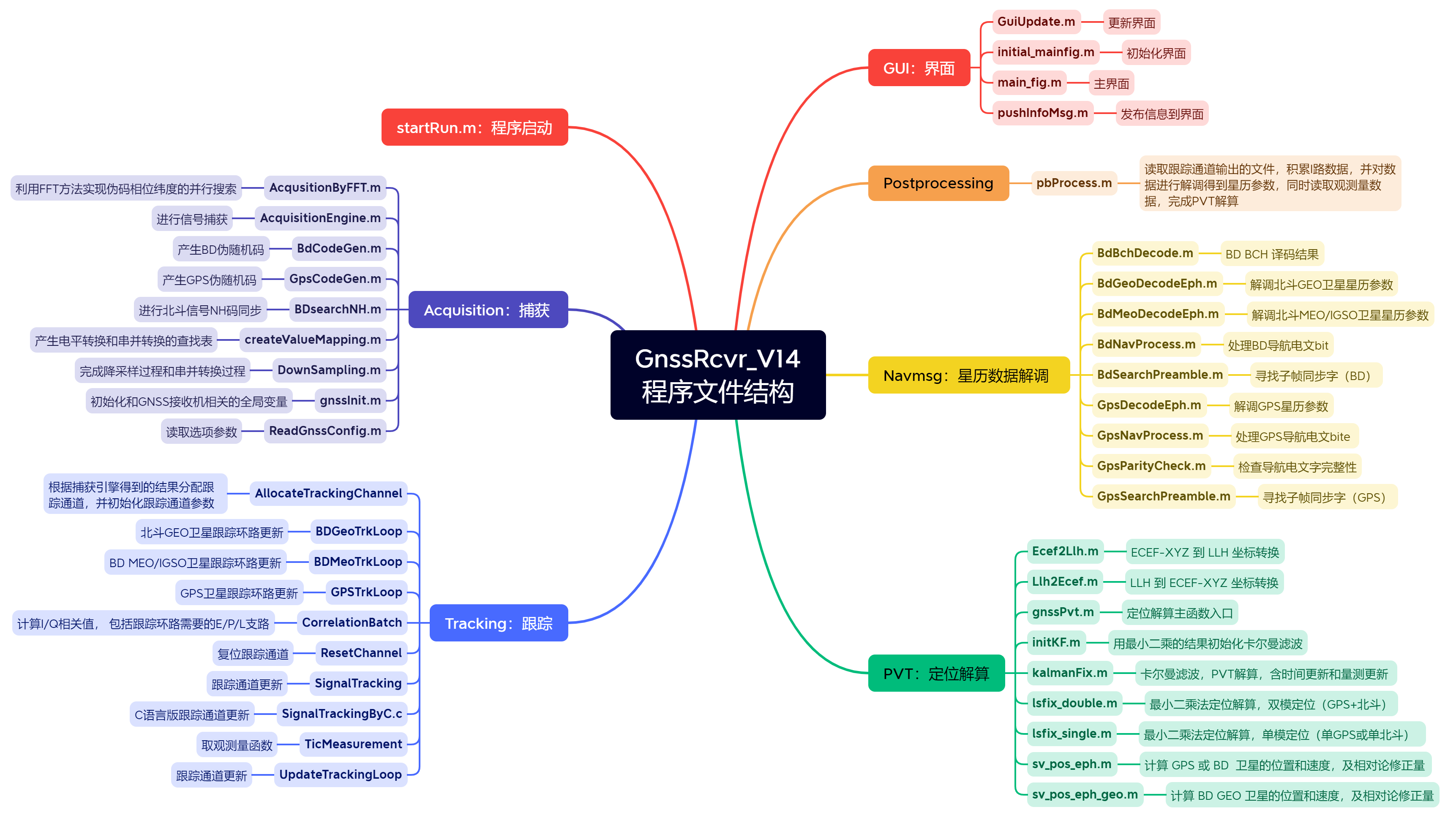 +
-* 网址:http://www.gnssbook.cn/book2/index.html
+包含以下估计器:
-* 程序下载:http://www.gnssbook.cn/book2/GnssRcvr_V14.rar
+
-* 实例北斗GPS双模中频数据文件下载:[UTREK210_16369000_70s.DAT](https://pan.baidu.com/s/1EWB0oQxDneNDk9iqExLuqQ),提取码: 829c
+> 补充:GICI 还在持续更新,前段时间看作者还准备加 PPP/IMU/Camera 紧组合模式。
- 👆👆👆 - 转到源码解读 + 👆👆👆 + 转到源码解读 or - 转到项目地址 + 转到项目地址 or 回到开头 👆👆👆 + --- -### 16-PocketSDR:带射频前端的后处理 GNSS 软件接收机 +### 12-VINS:光流法视觉惯性 SLAM + +与双目相机和 RGB-D 相机相比,单目相机具有结构简单、成本低和处理速度快的优点。然而,单目 VSLAM 存在尺度不确定性、无法对齐位姿和重力方向的自身缺点和快速运动导致的运动模糊的环境下容易跟踪丢失等不足。为弥补此问题,可将单目相机和 IMU 相结合的传感器融合,这种融合方案被称为单目视觉惯性里程计(Visual Inertial Odometry,VIO)或单目视觉惯性 SLAM(Visual-inertial SLAM,VINS)。 -PocketSDR 是 RTKLIB 作者写的一款 GNSS 软件接收机,包含一个射频前端和一套后处理 GNSS 接收机程序(只支持后处理),实现了一整套完整的 GNSS 接收机功能,采用 C、Python 编写,支持几乎所有的 GNSS 信号(比商业接收机支持的还要多),目前 0.8 版本的程序支持的信号如下: +* IMU 也可以弥补视觉 SLAM 在短时间、快速运动上的不足,另外由于 IMU 不依赖外界环境信息,对环境变化不敏感,也可以在少纹理、明暗变化较大或者光线较弱场景内提供短期的定位方案以及位姿估计方案。 -* **GPS**: L1C/A, L1CP, L1CD, L2CM, L5I, L5Q, -* **GLONASS**: L1C/A, L2C/A, L3OCD, L3OCP, -* **Galileo**: E1B, E1C, E5aI, E5aQ, E5bI, E5bQ, E6B, E6C, -* **QZSS**: L1C/A, L1C/B, L1CP,L1CD, L1S, L2CM, L5I, L5Q, L5SI, L5SQ, L6D, L6E, -* **BeiDou**: B1I, B1CP, B1CD, B2I,B2aD, B2aP, B2bI, B3I, -* **NavIC**: L5-SPS, SBAS: L1C/A, L5I, L5Q +* 较之惯性信息,视觉里程计可以提供丰富的外界信息,在低速平稳的运动中位姿估计稳定,而且视觉里程计在长时间运行后的漂移较小,并且可以通过回环检测修正自身位置以减小累积误差。 +香港科技大学沈劭劼团队开发的 VINS 系统,用了一种紧耦合的非线性优化方法。该团队在 2017 年发布的 VINS-Mono 通过在四元数上进行 IMU 的预积分,并且采用滑动窗口法融合 IMU 信息和相机观测到的特征数据,实现了数据的紧耦合。并且采用四自由度的图优化方法实现了回环检测模块,来得到全局约束。在 2019 年,该团队又发布了 VINS-Fusion,在 VINS-Mono 的基础上又加入了双目、双目+IMU 等更多的传感器类型,以及支持了 VINS 和 GPS 的融合。它支持在线标定相机及 IMU 参数及鱼眼相机模型,并且支持保存当前地图和加载过往地图。在与 IMU 的结合上,它采用了四元数积分方案,与视觉信息进行紧耦合,具有很强的鲁棒性和定位精度。 +
👆👆👆 - 转到源码解读 + 转到源码解读 or - 转到项目地址 + 转到项目地址 or 回到开头 👆👆👆 - --- -### 17-POSGO:图优化 GNSS 伪距定位 - -POSGO,全称 POSition based on Graph Optimization,是由武汉大学 GNSS 定轨中心李政开源的一套图优化 GNSS 伪距定位程序。该程序目前主要侧重于以伪距为核心的 SPP(单点定位)和 RTD(实时伪距差分定位)解算,并兼容 EKF(扩展卡尔曼滤波器)和 GO(图优化)解算方法。整个项目涵盖了约 8000行的 C++ 代码和 700 行的 Python 脚本,C++ 部分的代码在 RTKLIB 的基础上,进行了面向对象的改编和优化;Python 部分则包含了 Analyze 和 AnalyzeStatic 两个结果分析脚本。POSGO 使用了来自城市道路的动态车辆手机实验数据进行测试。实验结果显示,在遮挡严重的区域,GO解算方法相较于传统的 LS(最小二乘法)和 EKF 解算方法,展现出了更高的定位精度和更强的稳健性。POSGO 未来计划引入对载波相位的支持,以进一步提升定位的精准度,并计划加入对多传感器融合的支持。 +### 13-ORB-SLAM3:特征点法视觉惯性图优化 SLAM - +ORB 指 **O**riented FAST and **r**otated **B**RIEF,是一种结合 FAST 和 BRIEF,并引入旋转不变性的一种特征点和描述子;SLAM 指 **S**imultaneous **L**ocalization **a**nd **M**apping,指的是同时进行实时定位和地图构建。 +ORB-SLAM3 是**迄今为止,最完整的视觉惯性 SLAM 系统系统**,它是第一个集成了单目相机、双目相机、RGB-D相机,以及单目相机结合 IMU、双目相机结合 IMU 的 SLAM 系统。并且在 ORB-SLAM2 的基础上,改进了相机模型,使其不再局限于传统的小孔成像模型,而是可以**扩展到鱼眼模型**。在与 IMU 的结合上,它根据运动模型在流形上进行 **IMU 的预积分**的方式,然后采用非线性优化的思想,**将 IMU 的预积分结果和视觉 SLAM 的重投影模型一同进行图优化,使得预积分残差以及重投影误差共同达到最小**,以此来完成视觉信息和惯导系统的**紧耦合**。并且它采用了更为快速的**初始化**方法,以及丢失跟踪后利用惯导系统快速**重定位**方法。此外,它还采用**地图集**的方式,实现了对大场景的定位建图。这也是如今众多开源方案中,功能最强大、最精准的方法。系统框图如下: +
👆👆👆 - 转到源码解读 + 转到源码解读 or - 转到项目地址 + 转到项目地址 or 回到开头 👆👆👆 - --- -### 18-GINAV:GNSS-INS Matlab 工具箱 - -GINav 是 2020 年发布在 GPS Solution 上开源 GNSS/INS 紧组合工具箱,支持多模多频(单频到三频)GNSS 数据处理,支持多种处理模式 ,包括 SPP、PPD、PPK、PPS GNSS/INS 组合导航算法开发与测试。软件采用纯 MATLAB 编写,src 目录下共 325 个 .m 文件,约 12000 行代码;GNSS 部分的代码是移植 RTKLIB 和 GAMP,IMU 递推算法移植自 PSINS,使用过 RTKLIB 的朋友应该很容易就能上手。 - -与 RTKLIB、Ginan、IGNav 等 C/C++ 编写的导航定位解算程序相比,MATLAB 编写的 GINav 可移植性更差,执行效率低,PPK 解算比 RTKLIB 慢 20 倍;GINav 的优点是简单,调试方便,在变量区可以直接看到矩阵的值,MATLAB 提供的数据处理和分析功能更丰富,方便进行算法的学习和研究。 +### 14-ROS导航功能包:自主导航机器人定位/建图/路径规划 -与同为 MATLAB 实现的 PSINS 捷联惯导工具箱相比,GINav 更侧重 GNSS 和紧组合算法,实现的惯导和滤波算法远没有 PSINS 丰富。与同为 MATLAB 实现的 goGPS 相比,GINav 的源码和软件使用方式都更简单,采用纯面向过程风格,很多的结构体和函数都与 RTKLIB 和 GAMP 一致,更容易上手。 +功能简单来说,就是根据输入的里程计等传感器的信息流和机器人的全局位置,通过导航算法,计算得出安全可靠的机器人速度控制指令。广泛用在一些对可靠性要求没那么高的自主导航机器人场景中,比如扫地机器人、物流机器人等。 - +
-> 推荐阅读:[MJy65535:GINav 学习笔记](https://blog.csdn.net/MJy65535/article/details/130030063)
+
👆👆👆 - 转到源码解读 + 转到源码解读 or - 转到项目地址 + 转到项目地址 or 回到开头 👆👆👆 diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\347\256\227\346\263\225\350\247\243\346\203\221/\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2013-\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\347\256\227\346\263\225\350\247\243\346\203\221/\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2013-\350\207\252\351\200\202\345\272\224\346\212\227\345\267\256\346\273\244\346\263\242\347\220\206\350\256\272\345\217\212\345\272\224\347\224\250\347\232\204\344\270\273\350\246\201\350\277\233\345\261\225_\346\235\250\345\205\203\345\226\234.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2016-\345\215\253\346\230\237\345\256\232\344\275\215\350\275\257\344\273\266\346\216\245\346\224\266\346\234\272\347\240\224\347\251\266\347\273\274\350\277\260_\345\274\240\351\271\217\345\250\234.pdf" diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf" new file mode 100644 index 0000000..474f9d6 Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2017-\345\215\253\346\230\237\345\257\274\350\210\252\345\256\232\344\275\215\345\237\272\345\207\206\347\253\231\347\275\221\347\232\204\345\217\221\345\261\225\347\216\260\347\212\266\343\200\201\346\234\272\351\201\207\344\270\216\346\214\221\346\210\230_\345\247\234\345\215\253\345\271\263.pdf" differ diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2018-\351\207\217\345\255\220\345\256\232\344\275\215\345\257\274\350\210\252\346\212\200\346\234\257\347\240\224\347\251\266\344\270\216\345\217\221\345\261\225\347\216\260\347\212\266_\345\256\213\345\237\271\345\270\205.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2019-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272GNSS\345\217\221\345\261\225\347\273\274\350\277\260_\345\274\240\345\260\217\347\272\242.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2020-\345\215\253\346\230\237\345\257\274\350\210\252\344\277\241\351\201\223\346\250\241\345\236\213\347\273\274\350\277\260_\345\221\250\351\241\272.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-GNSS\345\215\253\346\230\237\347\262\276\345\257\206\345\256\232\350\275\250\347\273\274\350\277\260\357\274\232\347\216\260\347\212\266\343\200\201\346\214\221\346\210\230\344\270\216\346\234\272\351\201\207_\346\235\216\346\230\237\346\230\237.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\347\256\227\346\263\225\350\247\243\346\203\221/On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\347\256\227\346\263\225\350\247\243\346\203\221/On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-On State Estimation in Multi-Sensor Fusion Navigation\357\274\232Optimization and Filtering.pdf" diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf" new file mode 100644 index 0000000..121c34c Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-Review of PPP\342\200\223RTK\357\274\232 achievements, challenges, and opportunities.pdf" differ diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\344\274\240\346\204\237\345\231\250\350\236\215\345\220\210\347\212\266\346\200\201\344\274\260\350\256\241\346\226\271\346\263\225\347\273\274\350\277\260_\345\274\240\345\272\267\347\232\223.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\345\244\232\346\272\220\350\236\215\345\220\210\345\256\232\344\275\215\347\256\227\346\263\225\347\273\274\350\277\260_\350\243\264\345\207\214.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\346\203\257\346\200\247_\350\247\206\350\247\211_\346\277\200\345\205\211\351\233\267\350\276\276SLAM\346\212\200\346\234\257\347\273\274\350\277\260_\346\257\233\345\206\233.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2022-\350\247\206\350\247\211\345\217\212\345\205\266\350\236\215\345\220\210\346\203\257\346\200\247\347\232\204SLAM\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\233\276\345\272\206\345\214\226.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-A Comprehensive Review of GNSS-INS Integration Techniques for Land and Air Vehicle Applications.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_INS\350\266\205\347\264\247\347\273\204\345\220\210\345\257\274\350\210\252\347\273\274\350\277\260_\345\200\252\345\260\221\346\235\260.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS_RTK\345\256\232\344\275\215\346\212\200\346\234\257\347\232\204\345\217\221\345\261\225\345\216\206\347\250\213\345\222\214\346\234\272\351\201\207_\345\256\213\344\274\237.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-GNSS\347\233\264\346\216\245\344\275\215\347\275\256\344\274\260\350\256\241\346\212\200\346\234\257\347\273\274\350\277\260_\345\221\250\345\277\227\345\201\245.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-UWB\345\256\232\344\275\215\345\272\224\347\224\250\347\273\274\350\277\260_\351\203\255\346\260\270\345\274\272.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-UWB\345\256\232\344\275\215\345\272\224\347\224\250\347\273\274\350\277\260_\351\203\255\346\260\270\345\274\272.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-UWB\345\256\232\344\275\215\345\272\224\347\224\250\347\273\274\350\277\260_\351\203\255\346\260\270\345\274\272.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-UWB\345\256\232\344\275\215\345\272\224\347\224\250\347\273\274\350\277\260_\351\203\255\346\260\270\345\274\272.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\344\270\255\345\233\275\345\244\247\345\234\260\346\265\213\351\207\217\347\240\224\347\251\266\350\277\233\345\261\225\357\274\2102019\342\200\2242023\357\274\211_\345\205\232\344\272\232\346\260\221.pdf" diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf" new file mode 100644 index 0000000..3f37b11 Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\237\272\344\272\216\347\273\204\345\220\210\345\257\274\350\210\252\347\232\204\346\254\272\351\252\227\346\243\200\346\265\213\347\240\224\347\251\266\347\273\274\350\277\260_\350\260\242\350\212\263.pdf" differ diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf" new file mode 100644 index 0000000..29ac85c Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\244\232\351\242\221\345\244\232\346\250\241GNSS\351\253\230\347\262\276\345\272\246\345\256\232\344\275\215\345\205\263\351\224\256\346\212\200\346\234\257\344\270\216\346\214\221\346\210\230_\346\235\216\345\215\232\345\263\260.pdf" differ diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\345\256\244\345\206\205\345\244\226\345\256\232\344\275\215\346\212\200\346\234\257\347\273\274\350\277\260_\350\213\217\347\264\240\347\207\225.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\347\211\251\344\275\223\347\272\247\350\257\255\344\271\211\350\247\206\350\247\211SLAM\347\240\224\347\251\266\347\273\274\350\277\260_\347\224\260\347\221\236.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2023-\350\247\206\350\247\211\346\203\257\346\200\247\345\257\274\350\210\252\347\263\273\347\273\237\345\210\235\345\247\213\345\214\226\346\226\271\346\263\225\347\273\274\350\277\260_\345\210\230\345\223\262.pdf" diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf" new file mode 100644 index 0000000..47a84c0 Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Android\346\231\272\350\203\275\346\211\213\346\234\272GNSS\345\256\232\344\275\215\347\240\224\347\251\266\350\277\233\345\261\225_\345\274\240\345\256\235.pdf" differ diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Inertial Positioning\357\274\232A Survey.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-Deep Learning for Visual Localization and Mapping\357\274\232A Survey.pdf" diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf" new file mode 100644 index 0000000..5ed90c2 Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\344\275\216\350\275\250\345\257\274\350\210\252\345\242\236\345\274\272\346\212\200\346\234\257\345\217\221\345\261\225\347\273\274\350\277\260_\346\235\216\346\225\217.pdf" differ diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf" new file mode 100644 index 0000000..c2aca57 Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\210\251\347\224\250\346\234\272\345\231\250\345\255\246\344\271\240\347\232\204GNSS\346\254\272\351\252\227\346\243\200\346\265\213\347\273\274\350\277\260_\345\221\250\351\233\205\345\205\260.pdf" differ diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf" new file mode 100644 index 0000000..1600e63 Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\215\253\346\230\237\345\257\274\350\210\252\346\254\272\351\252\227\345\271\262\346\211\260\346\243\200\346\265\213\344\270\216\346\212\221\345\210\266\346\212\200\346\234\257\347\273\274\350\277\260_\345\200\252\346\267\221\347\207\225.pdf" differ diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\345\237\272\344\272\216\347\245\236\347\273\217\347\275\221\347\273\234\347\232\204VSLAM\347\273\274\350\277\260_\345\260\232\345\205\211\346\266\233.pdf" diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf" new file mode 100644 index 0000000..730e301 Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\254\247\347\276\216\346\234\210\347\220\203GNSS\350\247\204\345\210\222\347\216\260\347\212\266\345\210\206\346\236\220\347\273\274\350\277\260_\345\274\240\344\272\221.pdf" differ diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf" similarity index 100% rename from "\345\257\274\350\210\252\345\256\232\344\275\215\350\256\276\345\244\207\344\270\212\346\211\213/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf" rename to "\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\346\277\200\345\205\211\351\233\267\350\276\276SLAM\347\256\227\346\263\225\347\273\274\350\277\260_\345\210\230\351\223\255\345\223\262.pdf" diff --git "a/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf" "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf" new file mode 100644 index 0000000..d38ff9e Binary files /dev/null and "b/\345\220\204\351\242\206\345\237\237\347\273\274\350\277\260\350\256\272\346\226\207/2024-\351\231\220\345\210\266\347\216\257\345\242\203\344\270\213\347\232\204GNSS\347\262\276\345\257\206\346\216\210\346\227\266\346\226\271\346\263\225\347\240\224\347\251\266\347\273\274\350\277\260_\344\272\216\345\220\210\347\220\206.pdf" differ diff --git "a/10-GNSS-SDR\346\272\220\347\240\201\351\230\205\350\257\273/01-GNSS-SDR\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\350\275\257\344\273\266\344\273\213\347\273\215\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/GNSS-SDR\357\274\232\350\275\257\344\273\266\344\273\213\347\273\215\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md" similarity index 100% rename from "10-GNSS-SDR\346\272\220\347\240\201\351\230\205\350\257\273/01-GNSS-SDR\346\272\220\347\240\201\351\230\205\350\257\273\357\274\210\344\270\200\357\274\211\350\275\257\344\273\266\344\273\213\347\273\215\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/GNSS-SDR\357\274\232\350\275\257\344\273\266\344\273\213\347\273\215\343\200\201\347\274\226\350\257\221\350\260\203\350\257\225\343\200\201\351\205\215\347\275\256\346\226\207\344\273\266.md" diff --git "a/GPS Toolbox \346\212\225\347\250\277\351\241\271\347\233\256\346\221\230\350\246\201\347\277\273\350\257\221.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/GPS Toolbox \346\212\225\347\250\277\351\241\271\347\233\256\346\221\230\350\246\201\347\277\273\350\257\221.md" similarity index 100% rename from "GPS Toolbox \346\212\225\347\250\277\351\241\271\347\233\256\346\221\230\350\246\201\347\277\273\350\257\221.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/GPS Toolbox \346\212\225\347\250\277\351\241\271\347\233\256\346\221\230\350\246\201\347\277\273\350\257\221.md" diff --git "a/05-goGPS\346\272\220\347\240\201\351\230\205\350\257\273/goGPS WiKi\347\275\221\347\253\231\347\277\273\350\257\221.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/goGPS WiKi\347\275\221\347\253\231\347\277\273\350\257\221.md" similarity index 100% rename from "05-goGPS\346\272\220\347\240\201\351\230\205\350\257\273/goGPS WiKi\347\275\221\347\253\231\347\277\273\350\257\221.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/goGPS WiKi\347\275\221\347\253\231\347\277\273\350\257\221.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/01-FPGA \344\270\212\347\232\204\347\256\200\346\230\223 SDR \346\216\245\346\224\266\346\234\272.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/01-FPGA \344\270\212\347\232\204\347\256\200\346\230\223 SDR \346\216\245\346\224\266\346\234\272.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/01-FPGA \344\270\212\347\232\204\347\256\200\346\230\223 SDR \346\216\245\346\224\266\346\234\272.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/01-FPGA \344\270\212\347\232\204\347\256\200\346\230\223 SDR \346\216\245\346\224\266\346\234\272.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/02-FPGA \344\270\212\347\232\204\347\213\254\347\253\213 SDR \346\216\245\346\224\266\346\234\272.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/02-FPGA \344\270\212\347\232\204\347\213\254\347\253\213 SDR \346\216\245\346\224\266\346\234\272.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/02-FPGA \344\270\212\347\232\204\347\213\254\347\253\213 SDR \346\216\245\346\224\266\346\234\272.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/02-FPGA \344\270\212\347\232\204\347\213\254\347\253\213 SDR \346\216\245\346\224\266\346\234\272.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/03-\350\207\252\345\210\266\345\237\272\344\272\216 FPGA \347\232\204 GPS \346\216\245\346\224\266\346\234\272.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/03-\350\207\252\345\210\266\345\237\272\344\272\216 FPGA \347\232\204 GPS \346\216\245\346\224\266\346\234\272.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/03-\350\207\252\345\210\266\345\237\272\344\272\216 FPGA \347\232\204 GPS \346\216\245\346\224\266\346\234\272.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/03-\350\207\252\345\210\266\345\237\272\344\272\216 FPGA \347\232\204 GPS \346\216\245\346\224\266\346\234\272.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/04-\346\227\247 GPS \346\216\245\346\224\266\346\234\272\347\232\204\346\226\260\347\224\237\345\221\275.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/04-\346\227\247 GPS \346\216\245\346\224\266\346\234\272\347\232\204\346\226\260\347\224\237\345\221\275.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/04-\346\227\247 GPS \346\216\245\346\224\266\346\234\272\347\232\204\346\226\260\347\224\237\345\221\275.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/04-\346\227\247 GPS \346\216\245\346\224\266\346\234\272\347\232\204\346\226\260\347\224\237\345\221\275.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/05-\345\237\272\344\272\216 MCU \347\232\204 GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/05-\345\237\272\344\272\216 MCU \347\232\204 GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/05-\345\237\272\344\272\216 MCU \347\232\204 GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272/05-\345\237\272\344\272\216 MCU \347\232\204 GPS \350\275\257\344\273\266\346\216\245\346\224\266\346\234\272.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/01-\350\207\252\345\210\266\347\233\270\344\275\215\346\277\200\345\205\211\346\265\213\350\267\235\344\273\252.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/01-\350\207\252\345\210\266\347\233\270\344\275\215\346\277\200\345\205\211\346\265\213\350\267\235\344\273\252.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/01-\350\207\252\345\210\266\347\233\270\344\275\215\346\277\200\345\205\211\346\265\213\350\267\235\344\273\252.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/01-\350\207\252\345\210\266\347\233\270\344\275\215\346\277\200\345\205\211\346\265\213\350\267\235\344\273\252.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/02-.\346\277\200\345\205\211\346\265\213\350\267\235\344\274\240\346\204\237\345\231\250\347\232\204\351\200\206\345\220\221\345\267\245\347\250\213.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/02-.\346\277\200\345\205\211\346\265\213\350\267\235\344\274\240\346\204\237\345\231\250\347\232\204\351\200\206\345\220\221\345\267\245\347\250\213.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/02-.\346\277\200\345\205\211\346\265\213\350\267\235\344\274\240\346\204\237\345\231\250\347\232\204\351\200\206\345\220\221\345\267\245\347\250\213.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/02-.\346\277\200\345\205\211\346\265\213\350\267\235\344\274\240\346\204\237\345\231\250\347\232\204\351\200\206\345\220\221\345\267\245\347\250\213.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/03-\350\207\252\345\210\266\346\211\253\346\217\217\346\277\200\345\205\211\346\265\213\350\267\235\344\273\252.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/03-\350\207\252\345\210\266\346\211\253\346\217\217\346\277\200\345\205\211\346\265\213\350\267\235\344\273\252.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/03-\350\207\252\345\210\266\346\211\253\346\217\217\346\277\200\345\205\211\346\265\213\350\267\235\344\273\252.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/03-\350\207\252\345\210\266\346\211\253\346\217\217\346\277\200\345\205\211\346\265\213\350\267\235\344\273\252.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/04-Leuze RS4 \346\277\200\345\205\211\346\211\253\346\217\217\344\273\252\347\232\204\351\200\206\345\220\221\345\267\245\347\250\213.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/04-Leuze RS4 \346\277\200\345\205\211\346\211\253\346\217\217\344\273\252\347\232\204\351\200\206\345\220\221\345\267\245\347\250\213.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/04-Leuze RS4 \346\277\200\345\205\211\346\211\253\346\217\217\344\273\252\347\232\204\351\200\206\345\220\221\345\267\245\347\250\213.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/04-Leuze RS4 \346\277\200\345\205\211\346\211\253\346\217\217\344\273\252\347\232\204\351\200\206\345\220\221\345\267\245\347\250\213.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/05-\346\277\200\345\205\211\345\215\267\345\260\272\347\232\204\345\267\245\344\275\234\345\216\237\347\220\206\357\274\232\351\200\206\345\220\221\345\267\245\347\250\213.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/05-\346\277\200\345\205\211\345\215\267\345\260\272\347\232\204\345\267\245\344\275\234\345\216\237\347\220\206\357\274\232\351\200\206\345\220\221\345\267\245\347\250\213.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/05-\346\277\200\345\205\211\345\215\267\345\260\272\347\232\204\345\267\245\344\275\234\345\216\237\347\220\206\357\274\232\351\200\206\345\220\221\345\267\245\347\250\213.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/05-\346\277\200\345\205\211\345\215\267\345\260\272\347\232\204\345\267\245\344\275\234\345\216\237\347\220\206\357\274\232\351\200\206\345\220\221\345\267\245\347\250\213.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232iliasam-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276/06-\350\207\252\345\210\266\346\277\200\345\205\211\351\233\267\350\276\276\357\274\232OpenTOFLidar.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221A first look at RTKLIB with dual frequency receivers.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221A first look at RTKLIB with dual frequency receivers.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221A first look at RTKLIB with dual frequency receivers.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221A first look at RTKLIB with dual frequency receivers.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Demo5 code features RTKLIB-Demo5 \345\222\214 2.4.3\344\270\273\350\246\201\345\214\272\345\210\253.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Demo5 code features RTKLIB-Demo5 \345\222\214 2.4.3\344\270\273\350\246\201\345\214\272\345\210\253.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Demo5 code features RTKLIB-Demo5 \345\222\214 2.4.3\344\270\273\350\246\201\345\214\272\345\210\253.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Demo5 code features RTKLIB-Demo5 \345\222\214 2.4.3\344\270\273\350\246\201\345\214\272\345\210\253.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Glonass Ambiguity Resolution with RTKLIB Revisited \351\207\215\346\226\260\345\256\241\350\247\206RTKLIB\344\270\255\347\232\204GLONASS\346\250\241\347\263\212\345\272\246\345\233\272\345\256\232.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Glonass Ambiguity Resolution with RTKLIB Revisited \351\207\215\346\226\260\345\256\241\350\247\206RTKLIB\344\270\255\347\232\204GLONASS\346\250\241\347\263\212\345\272\246\345\233\272\345\256\232.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Glonass Ambiguity Resolution with RTKLIB Revisited \351\207\215\346\226\260\345\256\241\350\247\206RTKLIB\344\270\255\347\232\204GLONASS\346\250\241\347\263\212\345\272\246\345\233\272\345\256\232.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Glonass Ambiguity Resolution with RTKLIB Revisited \351\207\215\346\226\260\345\256\241\350\247\206RTKLIB\344\270\255\347\232\204GLONASS\346\250\241\347\263\212\345\272\246\345\233\272\345\256\232.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221RTKLIB Optimized Receiver Dynamics \344\277\256\346\224\271\346\227\266\351\227\264\346\233\264\346\226\260\346\226\271\345\274\217\344\273\245\345\207\217\345\260\221\345\212\250\346\200\201\346\250\241\345\274\217\350\256\241\347\256\227\351\207\217.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221RTKLIB Optimized Receiver Dynamics \344\277\256\346\224\271\346\227\266\351\227\264\346\233\264\346\226\260\346\226\271\345\274\217\344\273\245\345\207\217\345\260\221\345\212\250\346\200\201\346\250\241\345\274\217\350\256\241\347\256\227\351\207\217.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221RTKLIB Optimized Receiver Dynamics \344\277\256\346\224\271\346\227\266\351\227\264\346\233\264\346\226\260\346\226\271\345\274\217\344\273\245\345\207\217\345\260\221\345\212\250\346\200\201\346\250\241\345\274\217\350\256\241\347\256\227\351\207\217.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221RTKLIB Optimized Receiver Dynamics \344\277\256\346\224\271\346\227\266\351\227\264\346\233\264\346\226\260\346\226\271\345\274\217\344\273\245\345\207\217\345\260\221\345\212\250\346\200\201\346\250\241\345\274\217\350\256\241\347\256\227\351\207\217.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221RTKLIB Static-start feature \351\235\231\346\200\201\345\220\257\345\212\250\346\250\241\345\274\217.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221RTKLIB Static-start feature \351\235\231\346\200\201\345\220\257\345\212\250\346\250\241\345\274\217.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221RTKLIB Static-start feature \351\235\231\346\200\201\345\220\257\345\212\250\346\250\241\345\274\217.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221RTKLIB Static-start feature \351\235\231\346\200\201\345\220\257\345\212\250\346\250\241\345\274\217.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Raspberry Pi based PPK and RTK solutions with RTKLIB.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Raspberry Pi based PPK and RTK solutions with RTKLIB.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Raspberry Pi based PPK and RTK solutions with RTKLIB.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Raspberry Pi based PPK and RTK solutions with RTKLIB.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Updated guide to the RTKLIB configuration file.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Updated guide to the RTKLIB configuration file.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Updated guide to the RTKLIB configuration file.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\345\215\232\345\256\242\347\277\273\350\257\221\357\274\232rtklibexplorer/\343\200\220rtklibexployer\343\200\221Updated guide to the RTKLIB configuration file.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/21\345\271\264\345\211\215\345\215\201\345\220\215\347\273\217\351\252\214\345\210\206\344\272\253.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/21\345\271\264\345\211\215\345\215\201\345\220\215\347\273\217\351\252\214\345\210\206\344\272\253.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/21\345\271\264\345\211\215\345\215\201\345\220\215\347\273\217\351\252\214\345\210\206\344\272\253.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/21\345\271\264\345\211\215\345\215\201\345\220\215\347\273\217\351\252\214\345\210\206\344\272\253.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/22\345\271\264\345\211\215\345\215\201\345\220\215\347\273\217\351\252\214\345\210\206\344\272\253.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/22\345\271\264\345\211\215\345\215\201\345\220\215\347\273\217\351\252\214\345\210\206\344\272\253.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/22\345\271\264\345\211\215\345\215\201\345\220\215\347\273\217\351\252\214\345\210\206\344\272\253.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/22\345\271\264\345\211\215\345\215\201\345\220\215\347\273\217\351\252\214\345\210\206\344\272\253.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_baseline_csv_from_pos.py" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_baseline_csv_from_pos.py" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_baseline_csv_from_pos.py" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_baseline_csv_from_pos.py" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_groundtruth_csv.py" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_groundtruth_csv.py" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_groundtruth_csv.py" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_groundtruth_csv.py" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_submission.py" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_submission.py" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_submission.py" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/create_submission.py" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/get_base_data.py" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/get_base_data.py" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/get_base_data.py" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/get_base_data.py" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/gsdc_2023_config1.conf" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/gsdc_2023_config1.conf" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/gsdc_2023_config1.conf" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/gsdc_2023_config1.conf" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/run_ppk_multi.py" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/run_ppk_multi.py" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/run_ppk_multi.py" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Code\357\274\232Getting Started with RTKLIB/run_ppk_multi.py" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Getting started with RTKLIB 2023.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Getting started with RTKLIB 2023.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Getting started with RTKLIB 2023.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Getting started with RTKLIB 2023.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/IMU-ISA-100C Product Sheet.pdf" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/IMU-ISA-100C Product Sheet.pdf" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/IMU-ISA-100C Product Sheet.pdf" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/IMU-ISA-100C Product Sheet.pdf" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/README.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/README.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/README.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/README.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Real-time GNSS precise point positioning for low-cost smart devices.pdf" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Real-time GNSS precise point positioning for low-cost smart devices.pdf" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Real-time GNSS precise point positioning for low-cost smart devices.pdf" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/Real-time GNSS precise point positioning for low-cost smart devices.pdf" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\346\225\260\346\215\256\351\233\206\350\257\264\346\230\216_2023.md" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\346\225\260\346\215\256\351\233\206\350\257\264\346\230\216_2023.md" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\346\225\260\346\215\256\351\233\206\350\257\264\346\230\216_2023.md" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\346\225\260\346\215\256\351\233\206\350\257\264\346\230\216_2023.md" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/1st Place Winner of the Smartphone Decimeter Challenge Two-Step Optimization of Velocity and Position using Smartphone\342\200\231s Carrier Phase Observations.pdf" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/1st Place Winner of the Smartphone Decimeter Challenge Two-Step Optimization of Velocity and Position using Smartphone\342\200\231s Carrier Phase Observations.pdf" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/1st Place Winner of the Smartphone Decimeter Challenge Two-Step Optimization of Velocity and Position using Smartphone\342\200\231s Carrier Phase Observations.pdf" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/1st Place Winner of the Smartphone Decimeter Challenge Two-Step Optimization of Velocity and Position using Smartphone\342\200\231s Carrier Phase Observations.pdf" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Android Raw GNSS Measurement Datasets for Precise Positioning.pdf" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Android Raw GNSS Measurement Datasets for Precise Positioning.pdf" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Android Raw GNSS Measurement Datasets for Precise Positioning.pdf" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Android Raw GNSS Measurement Datasets for Precise Positioning.pdf" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Does the Android Operating System Provide what the MEMS-IMU Manufacturers Promise.pdf" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Does the Android Operating System Provide what the MEMS-IMU Manufacturers Promise.pdf" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Does the Android Operating System Provide what the MEMS-IMU Manufacturers Promise.pdf" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Does the Android Operating System Provide what the MEMS-IMU Manufacturers Promise.pdf" diff --git "a/\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements.pdf" "b/\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements.pdf" similarity index 100% rename from "\345\215\232\345\256\242\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements.pdf" rename to "\345\244\226\346\226\207\350\265\204\346\226\231\347\277\273\350\257\221/\350\260\267\346\255\214\345\210\206\347\261\263\347\272\247\346\211\213\346\234\272\345\256\232\344\275\215\346\257\224\350\265\233/\347\233\270\345\205\263\350\256\272\346\226\207/Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements.pdf" diff --git "a/\345\257\274\350\210\252\345\256\232\344\275\215\347\256\227\346\263\225\350\247\243\346\203\221/\345\214\227\346\226\227\344\270\211\351\242\221\347\233\270\344\275\215\350\247\202\346\265\213\345\200\274\347\272\277\346\200\247\347\273\204\345\220\210\346\250\241\345\236\213\345\217\212\347\211\271\346\200\247\347\240\224\347\251\266_\345\274\240\345\260\217\347\272\242.pdf" "b/\345\257\274\350\210\252\345\256\232\344\275\215\347\256\227\346\263\225\350\247\243\346\203\221/\345\214\227\346\226\227\344\270\211\351\242\221\347\233\270\344\275\215\350\247\202\346\265\213\345\200\274\347\272\277\346\200\247\347\273\204\345\220\210\346\250\241\345\236\213\345\217\212\347\211\271\346\200\247\347\240\224\347\251\266_\345\274\240\345\260\217\347\272\242.pdf" deleted file mode 100644 index 5f0b1f5..0000000 Binary files "a/\345\257\274\350\210\252\345\256\232\344\275\215\347\256\227\346\263\225\350\247\243\346\203\221/\345\214\227\346\226\227\344\270\211\351\242\221\347\233\270\344\275\215\350\247\202\346\265\213\345\200\274\347\272\277\346\200\247\347\273\204\345\220\210\346\250\241\345\236\213\345\217\212\347\211\271\346\200\247\347\240\224\347\251\266_\345\274\240\345\260\217\347\272\242.pdf" and /dev/null differ |