论文 #2
Comments
|
IEEE Xplore上就能找到 |
|
感谢提醒,已经在readme里添加论文链接了 |
|
感谢回复,还想请问以下您论文里的标定板是自己做的吗?还是有一些厂家可以做? |
是有厂家可以定做的 |
|
方便分享一下厂家联系方式吗 |
标定板是亚克力切割出来的,找任何的加工厂都可以做。
|

|
感谢回复,请问在采集数据的时候固定一个方位采集一段时间的数据就可以吗?还是需要换不同的方位? |
您好。一个位置是可以标定的,只是精度会差一些。推荐是将标定板放置在多个不同位置,以保证特征提取的丰富。我们IV 2023论文有做量化分析,如下: Livox LiDAR-Thermal Camera: Livox LiDAR-Ouster LiDAR: |


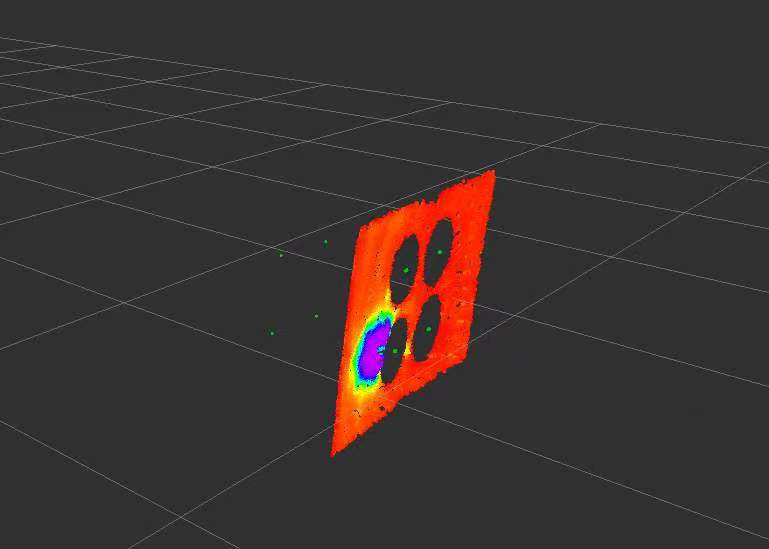
我制作了和您论文里一样的标定板,然后仅用激光雷达采集了数据,运行了velodyne_pattern.launch,标定板的点云可以在rviz中看到,但四个圆心并没有显示,请问这是什么原因? |



|
我发现velodyne_pattern_circle节点好像一直在暂停,然后我注释了velodyne_pattern_circle.cpp的main函数中if(!do_acc_boards){}的程序后,程序开始运行,但显示检测不到圆心点。
|

请问有按照readme里3.4的第3步输入y吗? |
|
似乎readme写的不够直白,造成使用不便,近期我会修改,感谢反馈 |
不键入y的话,feature point检测和采集是不会开始的 |
|
上面那个问题已经解决了,但是有个疑问,您给的数据包livox_rgb_thermal_rosbag中每个位置的时间都很短,激光特征点想要累计到60帧,只能循环播放,耗时很长,这是正常的吗? |
是正常的 |
累积60帧是针对livox horizon基于实验的最佳数据,对于velodyne这类lidar可以视情况适当减少累积帧数 |
|
[您好,我自己采了数据做实验,7个位置,每个位置累计了60帧,标定32线旋转激光雷达和红外相机,但最后误差较大(尤其是重投影误差,三十几个像素),请问有可能是什么原因呢(图片和rviz里显示的圆心特征和您给出的图里一样)?] |
红外相机的内参是正确的吗? |
|
内参应该是正确的,用加热的棋盘格标定板标的,重投影误差在0.4个像素 |
|
嗯,在rivz和图像上确认一下提取出来的圆心特征是否都是正确的吧 |
|
您好,我在多个视角多组数据标定的时候,也出现了随着组数增加重投影误差增大的情况。我在看rviz时发现,当前的激光平面的圆心里,保留了上一组数据的圆心,这是正常的吗?会不会是因为这个bug导致了多组数据标定时误差的增大? |
请问是/laser_pattern_circle/circle_center_cloud这个topic吗?可以尝试一下在rviz的display里将这个topic的显示去掉勾选再重新勾选显示,是否还是有保留上一组圆心。 |
请问您的论文在哪里可以找到?
The text was updated successfully, but these errors were encountered: